Geringere Wartezeiten, zuverlässigere Ankunftsprognosen und sichere Routen: Assistenzsysteme machen die Schifffahrt der Zukunft sicherer, effizienter und komfortabler. Sie spielen eine wichtige Rolle, wenn Teile des Güterverkehrs von der überlasteten Straße aufs Wasser verlagert werden sollen. Für die Idee des autonomen Fahrens auf dem Wasser müssen neue Technologien entwickelt, getestet und zertifiziert werden. Autonomie bedeutet aber auch, dass sich die Beziehung zwischen Mensch und Maschine verändern wird. Hierbei spielen die gesellschaftliche Akzeptanz, aber auch veränderte Arbeitsbedingungen und die Klärung rechtlicher Fragestellungen eine besondere Rolle. In all diesen Bereichen forscht das DLR.
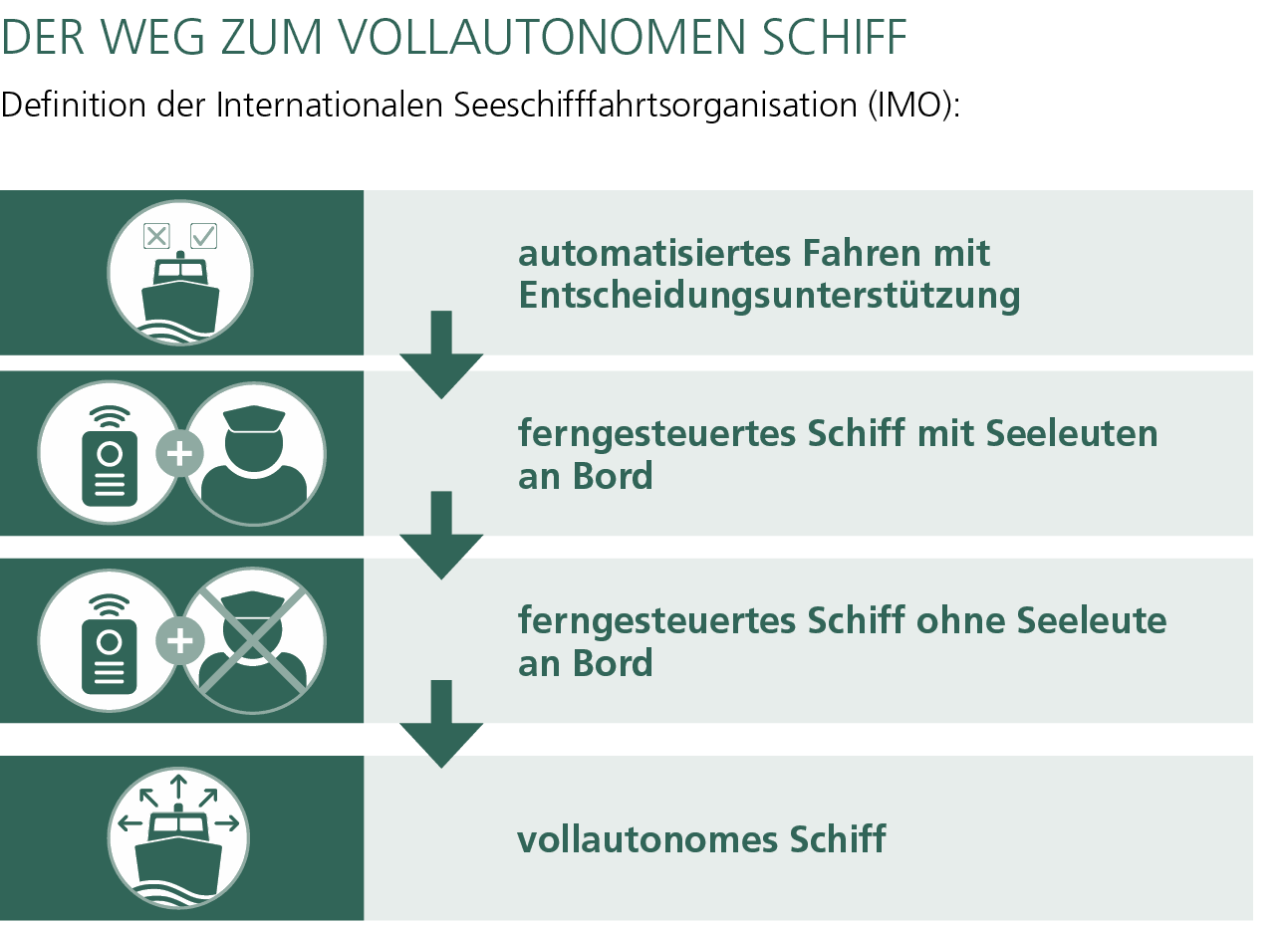
Fachleute unterscheiden zwischen automatisierten, ferngesteuerten und vollautonom fahrenden Schiffen. Vollautonom bedeutet, dass das Steuerungssystem des Schiffes in der Lage ist, Entscheidungen und Aktionen selbst auszuführen. Welcher Automatisierungsgrad für welches Schiff sinnvoll ist, hängt davon ab, wo es eingesetzt werden soll. Kurzstreckenfähren werden schon auf vollautonomer Basis erprobt. Damit autonome oder teilautonome Schiffe jedoch qualifiziert sowie rechtlich abgesichert eingesetzt werden können, muss die Technik an Bord sehr hohe Anforderungen an ihre Zuverlässigkeit erfüllen. Navigationsinstrumente müssen auch unter extremen Wetterbedingungen wie Eis, Nebel, Sturm, Gischt und Seegang so sicher funktionieren, dass sie die Aufgaben von Schiffsführenden an Bord übernehmen können. Alle Steuerungsinstrumente müssen zudem gegen Hacker-Angriffe von außen geschützt werden. Deshalb sind internationale Sicherheitsstandards in der Satellitenkommunikation sowie rechtliche Rahmenbedingungen notwendig. Um diese Themen sowohl für die Binnen- als auch für die Seeschifffahrt zu untersuchen, betreibt das DLR mehrere Testfelder und Forschungsboote.
Testfelder
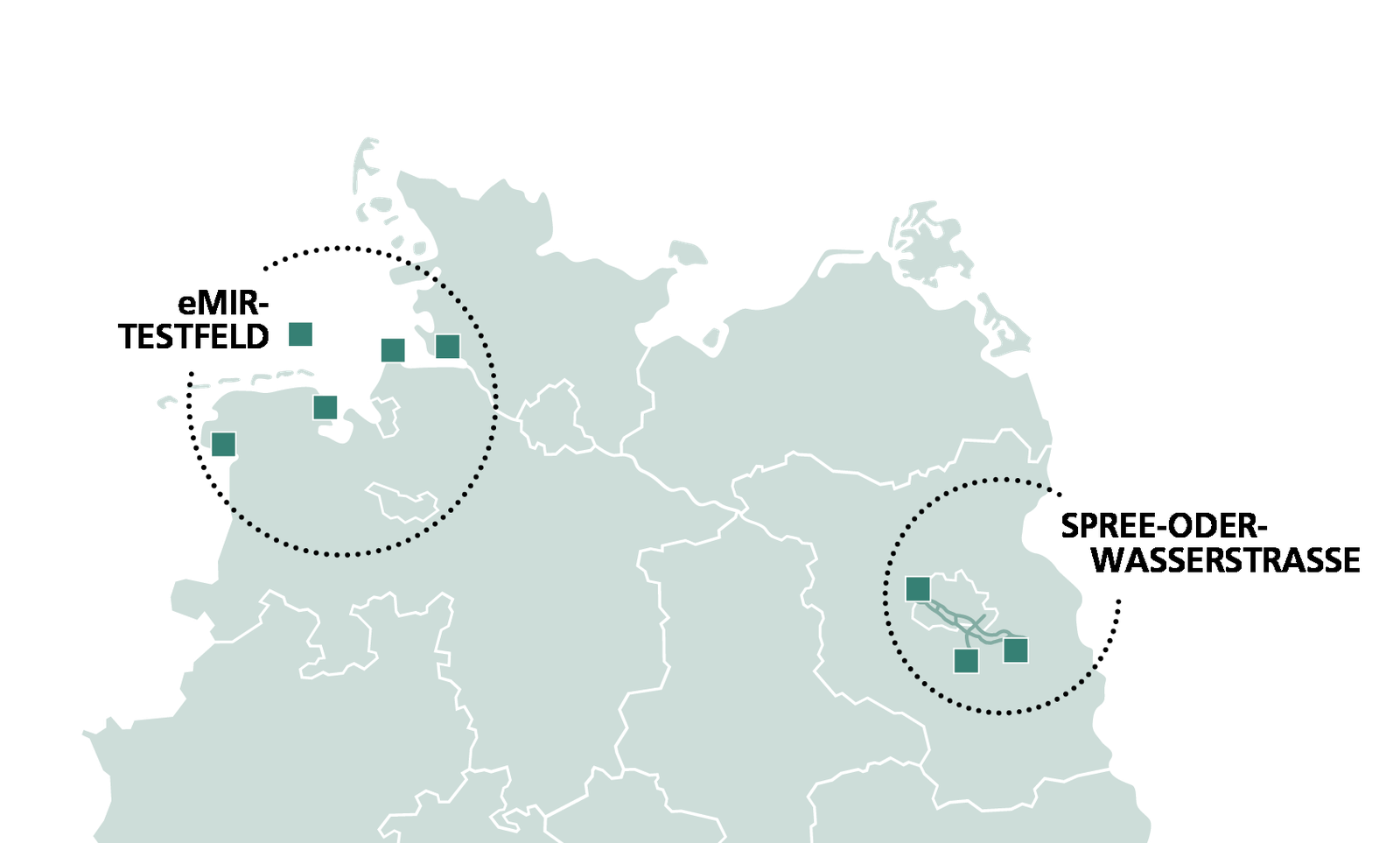
Auf den Testfeldern eMIR und Spree-Oder-Wasserstraße (SOW) erprobt das DLR Assistenzsysteme und logistische Prozesse für die Schifffahrt auf See und Binnengewässern.
Die Verkehrsleistung im Straßengüterverkehr hat sich in den letzten 30 Jahren nahezu verdoppelt. Vermehrte Staus und hohe Emissionen entlang der Verkehrswege sind die Folge. Aktuell werden in Deutschland nur etwa sieben Prozent der Güter auf Binnenwasserstraßen transportiert. „Die Verlagerung von Teilen des Transportes auf Flüsse und Kanäle ist ein wichtiger Beitrag, der dazu dient, nicht nur den Verkehr auf der Straße zu entlasten, sondern unter Einsatz neuer Technologien auch umweltfreundlicher zu gestalten“, so Thoralf Noack, Maritimer Koordinator im DLR. Allerdings sorgt der Klimawandel auch im Bereich der Binnenschifffahrt für neue Herausforderungen. Die Pegelstände des Ober- und Mittelrheins verringerten sich beispielsweise 2022 phasenweise so stark, dass Teile des Binnenschifffahrtsverkehrs zum Erliegen kamen. Auch wenn die Vertiefung von Fahrrinnen weiterhin eine wichtige Option bleiben wird, ist auch hier neues technisches Know-how gefragt. „Innovationen im Bereich neuer Transportsysteme, wie kleinere, autonome Schiffseinheiten mit geringem Tiefgang, deren Einsatz vom DLR gemeinsam mit der Industrie, kleinen und mittleren Unternehmen, anderen Forschungseinrichtungen und Behörden auf der Spree-Oder-Wasserstraße konzipiert werden, wären eine Option“, ergänzt Thoralf Noack.
Schiffsbrückensimulator
Das DLR betreibt beim Bundesamt für Seeschifffahrt und Hydrographie einen Schiffsbrückensimulator.
Digitales Testfeld auf der Spree-Oder-Wasserstraße
In Deutschland entsteht derzeit auf der Spree-Oder-Wasserstraße ein digitales Testfeld für die automatisierte und autonome Binnenschifffahrt. Anders als in der Schifffahrt auf hoher See kann der Empfang von Satellitendaten zur Navigation in bebauten Gebieten, vor allem an Brücken oder Schleusen, ungenau sein. Gerade dort aber ist eine zuverlässige Positionierung umso wichtiger, um die Bauwerke vor Kollision zu schützen und keine Einschränkungen des Verkehrs zu erzeugen. Die Lösung liegt hier im intelligenten Zusammenspiel von Satellitennavigation und weiterer Sensorik, die sowohl auf dem Schiff als auch an Land installiert ist, zum Beispiel an Häfen oder Schleuseneinfahrten. Das sind zum Beispiel Kameras, Laser- oder Radarsensoren, die Umgebungsdaten zentimetergenau messen. Dass diese Technik funktioniert, zeigte das DLR gemeinsam mit Forschung, Wirtschaft und Behörden, als es im August 2022 die MS Victor Hugo, ein 82 Meter langes und 10 Meter breites Fahrgastschiff, autonom in die Schleuse bei Straßburg navigieren ließ.
Positionsbestimmung mit Satellitendaten und Sensorik
Zur Positionsbestimmung nutzt das Assistenzsystem globale Navigationssatellitensysteme (GNSS) wie GPS und Galileo. Damit das Schiff aber sicher und zentimetergenau in die Schleuse einfahren kann, sind zusätzliche Korrekturdaten notwendig. Diese sollen zukünftig über VDES (VHF Data Exchange System) bereitgestellt werden. VDES ist der Nachfolger von AIS (Automatisches Identifikationssystem), einem Funksystem, das durch den Austausch von Navigations- und anderen Schiffsdaten die Sicherheit und die Lenkung des Schiffsverkehrs verbessert. Im Vergleich zu AIS verfügt VDES aber über eine größere Bandbreite und ermöglicht so eine störungsfreiere Datenübermittlung zwischen den Schiffen, den Basisstationen und den Verkehrszentralen. In die Entwicklung von VDES flossen umfangreiche Expertisen der Wissenschaftlerinnen und Wissenschaftler des DLR-Instituts für Kommunikation und Navigation ein. Aktuell begleiten sie auch den internationalen Standardisierungsprozess des Systems.
Maritimes Testfeld eMir auf der Nordsee
Um den hohen Automatisierungsgrad maritimer Systeme auch auf See zu erproben, betreibt das DLR mit Behörden und der Industrie das Testfeld e-Maritime Integrated Reference Platform (eMIR). Hier werden hochautomatisierte Assistenzsysteme zum Beispiel zur Vermeidung von Kollisionen erforscht und entwickelt. Das Testfeld besteht aus zwei Teilen: einer simulationsbasierten und einer realen Testumgebung auf See. Die virtuelle Infrastruktur umfasst Umwelt-, Verkehrs- und Schiffssimulatoren, die auf künstlicher Intelligenz basieren. Mit ihrer Hilfe können die Risiken und die Effizienz innovativer maritimer Systeme schon während der Produktentwicklung abgeschätzt werden. In dem physischen Testfeld – einem Seegebiet von Brunsbüttel über Cuxhaven und Wilhelmshaven bis nach Helgoland, das zu diesem Zweck mit Instrumenten ausgestattet wurde – können die maritimen Systeme unter realen Bedingungen getestet werden. Eine vollständige Schiffsbrücke, installiert in einem seegängigen Container, kann an Häfen aufgestellt werden oder auf Schiffen mit an Bord gehen. Prof. Axel Hahn, Direktor des Instituts für Systems Engineering für zukünftige Mobilität, betont den Nutzen des Testfelds: „eMir ist eine faszinierende Großanlage. Damit können wir Daten zum Seeverkehr erheben und eine Forschungsplattform anbieten, um die Entwicklung hochautomatisierter Systeme voranzutreiben.“
eMIR ermöglicht es, hochautomatisierte Assistenzsysteme und Konzepte für autonome Schiffe zu erforschen und zu entwickeln. Der Aufbau des maritimen Testfelds profitierte von der langjährigen Kooperation mit Partnern aus Forschung, Industrie und Behörden, insbesondere dem Bundesamt für Seeschifffahrt und Hydrographie (BSH).
Für die Wiedergabe dieses Videos auf Youtube.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
eMIR ermöglicht es, hochautomatisierte Assistenzsysteme und Konzepte für autonome Schiffe zu erforschen und zu entwickeln. Der Aufbau des maritimen Testfelds profitierte von der langjährigen Kooperation mit Partnern aus Forschung, Industrie und Behörden, insbesondere dem Bundesamt für Seeschifffahrt und Hydrographie (BSH).
Credit:
DLR, OFFIS – Institut für Informatik
Die DLR-Ausgründung Navanion
SmartKai
Sensoren messen den Abstand des Schiffs zur Kaimauer und helfen so beim Anlegen.
Credit:
Andreas Burmann
Bei Anlegemanövern entstehen immer wieder Schäden an Hafeninfrastruktur und Schiffen. Um das in Zukunft zu vermeiden, hat das DLR SmartKai die„Einparkhilfe XXL“ für Seeschiffe entwickelt. Ab Januar 2024 ist das System über die DLR-Ausgründung Navanion GmbH verfügbar. Es funktioniert wie folgt: In die Kaimauer sind Laser-, Radar- und Umweltsensoren integriert. Sie bestimmen sehr präzise die Geschwindigkeit des Schiffs und dessen Lage sowie dessen Abstand zur Kaimauer. Diese Informationen werden über eine im Hafen installierte SmartKai-Box mit weniger als einer Sekunde Verzögerung zur Schiffsbrücke gesendet. Dort werden die Informationen auf einer Seekarte visualisiert, hierzu ist ein beliebiges mobiles Endgerät nutzbar. Lotsen- und Brückenpersonal können mithilfe dieser Informationen entsprechend reagieren und navigieren. Auch nautisch relevante Umweltdaten wie Strömung, Wind und Tidenverhältnisse erfasst das System. SmartKai unterstützt gerade bei Manövern, die durch anliegende Hafeninfrastruktur, wie Stromliegeplätze, Schleusen und Durchfahrten, herausfordernd sind.
Die Häfen in Emden, Cuxhaven und Wilhelmshaven sind elementare Bestandteile von eMir. Hier können neue Technologien für den Hafenverkehr erforscht werden. Schiffsmanöver wie das An- und Ablegen werden so digitalisiert und mithilfe der gesammelten Daten automatisiert. Auch logistische Prozesse für den Hafenbetrieb, beispielsweise das Umschlagen von Waren, werden untersucht. In Emden testen die Forschenden aktuell ein Betriebskonzept für ein autonom fahrendes Baggerschiff, das den Hafen von Schlick befreien soll. Auf dem Forschungsboot Sally sind dafür Sensoren und Kameras angebracht, die die Umgebung im Blick behalten. Fahrende Schiffe oder der Abstand zur Kaimauer können so erfasst werden. Zudem ist Sally mit allerhand Assistenzsystemen wie Kollisionsvermeidungssensoren, Autopiloten und Systemen zur Objekterkennung ausgestattet. Auch hier kommt der portable eMir-Container zum Einsatz, von dem aus die Forschenden Sally fernsteuern. So wollen sie die Grenzen dieses Systems und eine zukünftige Zulassung auf einem Baggerschiff erproben.
Wenn Fahrzeuge autonom unterwegs sein sollen, müssen sie ihr Umfeld und Objekte in ihrer Nähe genauestens erkennen können. Dafür eignen sich Systeme und Verfahren unter Einsatz künstlicher Intelligenz (KI). Deren Programme müssen höchst vertrauenswürdig sein, sprich nicht fehleranfällig. Wie der Mensch muss auch eine KI erst lernen, Objekte wie Schiffe, Bojen, schwimmende Container, Menschen oder Meerestiere sowie Szenarien zu erkennen, um ihnen auszuweichen. Bei optischen, kamerabasierten Systemen wird die KI beispielsweise mit Bildern von Schiffen aus unterschiedlichen Perspektiven trainiert. Eine weitere Herausforderung sind sich ändernde Umweltbedingungen: Wassertropfen auf der Kameralinse könnten es erschweren, ein Objekt korrekt zu identifizieren. Auch ist die Zertifizierung dieser KI-Systeme eine besondere Herausforderung. Hierfür betreibt das DLR beim Bundesamt für Seeschifffahrt und Hydrographie einen Schiffsbrückensimulator. Für ihn entwickelten das DLR und das Bundesamt einen Testkatalog. Er enthält Tausende von Szenarien, die die KI in kürzester Zeit erkennen muss.
Vollautonomes Unterwasserfahrzeug
Der Weg zum autonomen Schiff
Definition der Internationalen Seeschifffahrtsorganisation (IMO):
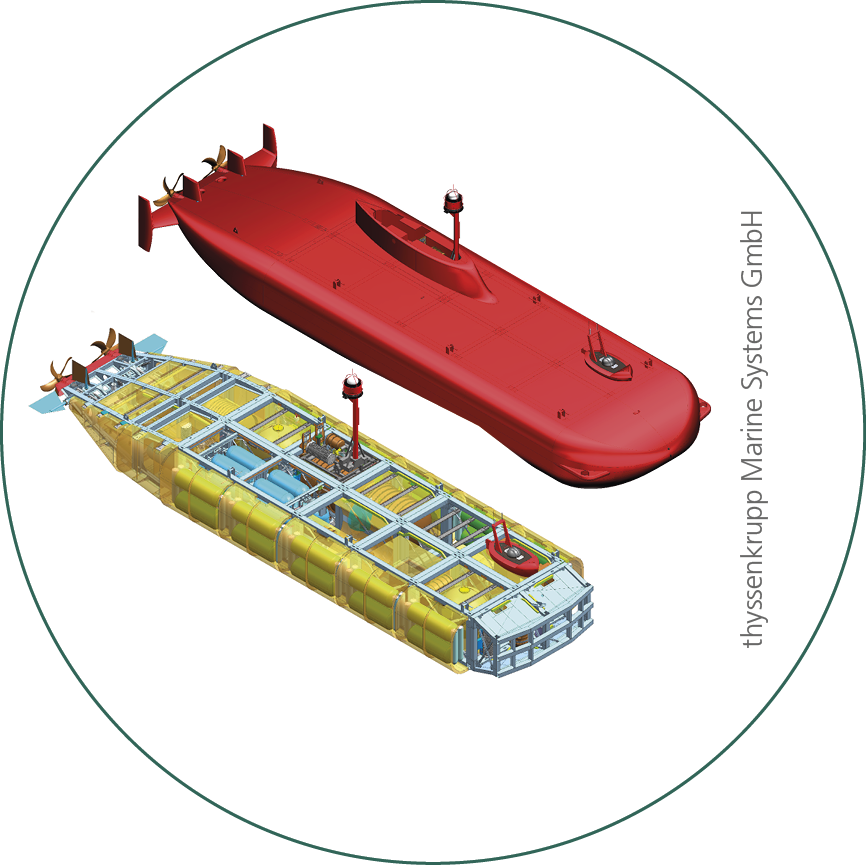
Das Large Modifiable Underwater Mothership, kurz MUM, soll mit seinem Brennstoffzellenantrieb bis zu 1.500 Seemeilen (2.700 Kilometer) unbemannt zurücklegen können. Es wird circa 50 Meter lang und lässt sich wie aus einem Baukasten mit unterschiedlichen Systemen bestücken: Batterien, Sensoren, Transportbehältern oder kleineren Unterseeroboterrn – daher auch der Name „Mothership“. Ein vom DLR entwickeltes laserbasiertes Kamerasystem kann per KI Objekte erkennen und sorgt dafür, dass MUM diese sicher und autonom umfahren kann. Hauptanwendungsfälle von MUM sind Wartungsarbeiten an Pipelines oder das Aufspüren und Entfernen von im Zweiten Weltkrieg versenkter Munition. „Der Vorteil ist, dass es auch bei schlechtem Wetter unter Wasser, also unter Sturm und Wellen, an kritischen Infrastrukturen wie Gaspipelines das ganze Jahr über autonom Reparaturen durchführen kann“, sagt Carl Wrede, stellvertretender Direktor des DLR-Instituts für den Schutz maritimer Infrastrukturen. Der Plan: Das große Mutterschiff fährt möglichst nah an eine Stelle, an der es ein kleineres U-Boot aussetzt, das dort mit einem Greifarm autonom Arbeiten ausführt.
Internationale gesetzliche Herausforderungen
MUM
Konzept für das vollautonome Unterwasserfahrzeug MUM
Credit:
thyssenkrupp Marine Systems GmbH
Nach Abschluss der Forschungsarbeiten soll MUM zum Produkt weiterentwickelt werden. Die gesellschaftliche Akzeptanz und mögliche Anwendungsszenarien hat das DLR in einer Umfrage evaluiert. Hierzu befragten die Forschenden mögliche Interessengruppen wie Kapitäninnen und Kapitäne, Schiffsbau-Unternehmen, Werften, wissenschaftliche Einrichtungen sowie Lotsinnen und Lotsen. Außerdem arbeiten sie an rechtlichen Rahmenbedingungen. Die Rechtslage ist auf hoher See an kein Land gebunden. Je nachdem, ob ein motorisiertes Schiff, ein Segelboot oder ein Fischkutter den Weg kreuzt, gelten andere Verkehrsregeln, auch in deutschen Hoheitsgewässern. Die gesellschaftliche Akzeptanz, Gesetzeslagen und die Vertrauenswürdigkeit der KI sind wichtige Einflussparameter bei der technischen Gestaltung des Schiffs. MUM wird zuerst in einem maritimen Testfeld in der Ostsee in mittleren Tiefen von 70 Meter erprobt. Bis es autonom in den Weltmeeren unterwegs sein kann, müssen die Internationale Seeschifffahrtsorganisation (IMO) und die einzelnen Staaten einen klaren Rechtsrahmen für den weltweiten Betrieb von autonomen Schiffen schaffen. Carl Wrede sieht hier Potenziale: „Das DLR hat das Alleinstellungsmerkmal, die technologische Entwicklung mit der rechtlichen vorantreiben zu können. Unsere Ingenieurinnen und Ingenieure, Juristinnen und Juristen arbeiten eng zusammen. Bei der Technologieentwicklung werden von Anfang an Rechtsfragen und bei der Erarbeitung eines Rechtsrahmens die Anforderungen an die Technologie mitgedacht. So möchten wir die autonome Schifffahrt sicher in die Anwendung bringen.“











{kind=link}
{kind=link}
{kind=link}
{kind=link}