PLATO - Design
PLATO Payload Design
The key scientific requirement to detect and characterise a large number of terrestrial planets and their host bright stars determined the design of PLATO's payload module. The module provides a wide field-of-view (FoV) to maximise the number of the sparsely distributed bright stars in the sky with one pointing, and allows the satellite to cover a large part of the sky. In addition, it provides the required photometric accuracy to detect Earth-sized planets and a high photometric dynamic range, allowing astronomers to observe bright stars (mV < 11) as well as fainter stars down to V-magnitude of 16. This performance is achieved by a multi-telescope instrument concept, which is novel for a space telescope.
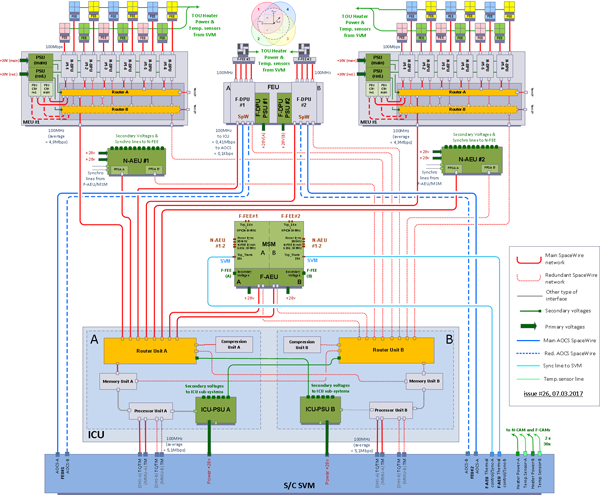
The PLATO payload is made of 24 almost identical “normal” cameras (N-CAM), two “fast” cameras (F-CAM), ancillary electrical units (2 N-AEUs and 1 F-AEU) and a data processing system (DPS). The cameras are mounted on an optical bench which belongs to the spacecraft. The electronic units are accommodated separately from the cameras inside the spacecraft structure. The N-CAMs are working at a nominal cadence of 25s and are monitoring stars fainter than magnitude 8 (photometry on saturated stars down to magnitude 4 will be possible). The F-CAMs are working at a cadence of 2.5s and mainly observing stars in the magnitude range 4 to 8. Additionally, the F-CAMs are used as fine guidance sensors (FGS). Each camera is equipped with its own CCD focal plane array, comprised of four CCDs provided by Teledyne e2v. Normal cameras operate in full frame mode with a ~1037 deg² effective field-of-view, fast cameras operate in frame transfer mode with a ~610 deg² field of view.
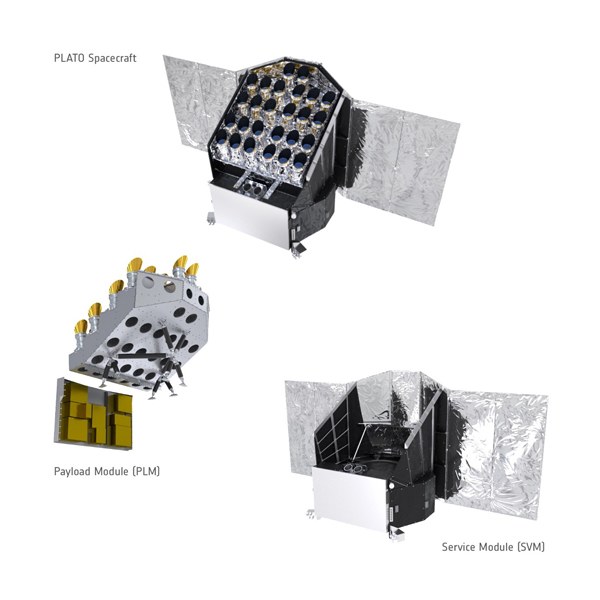

PLATO Satellite ©ESA
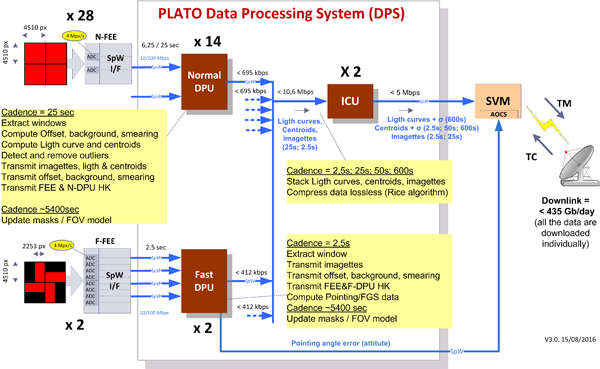
PLATO On-Board Data Flow Credit: DLR (CC BY-NC-ND 3.0)