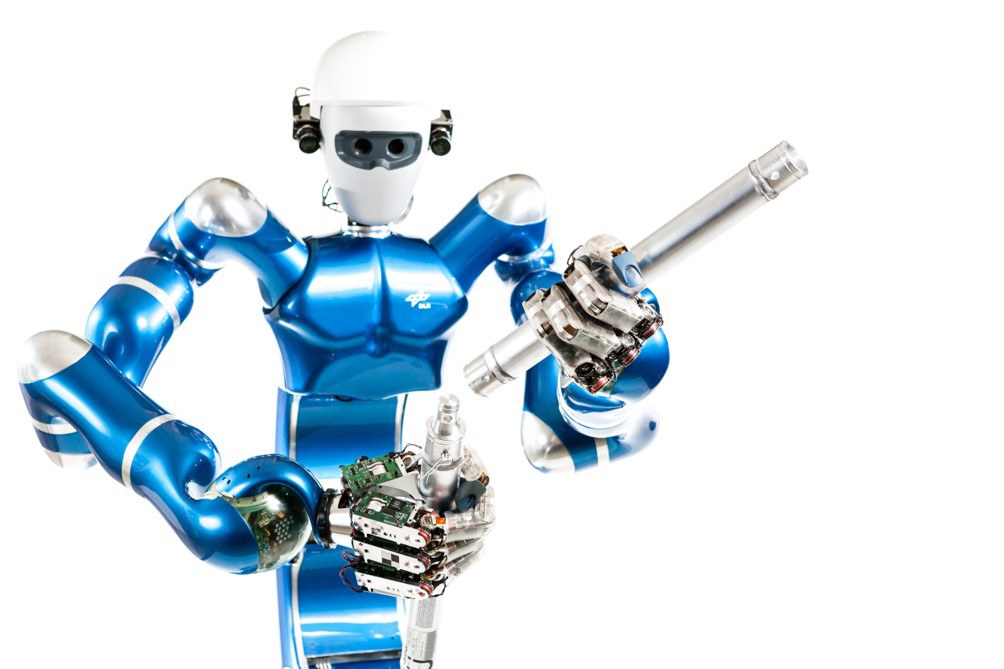
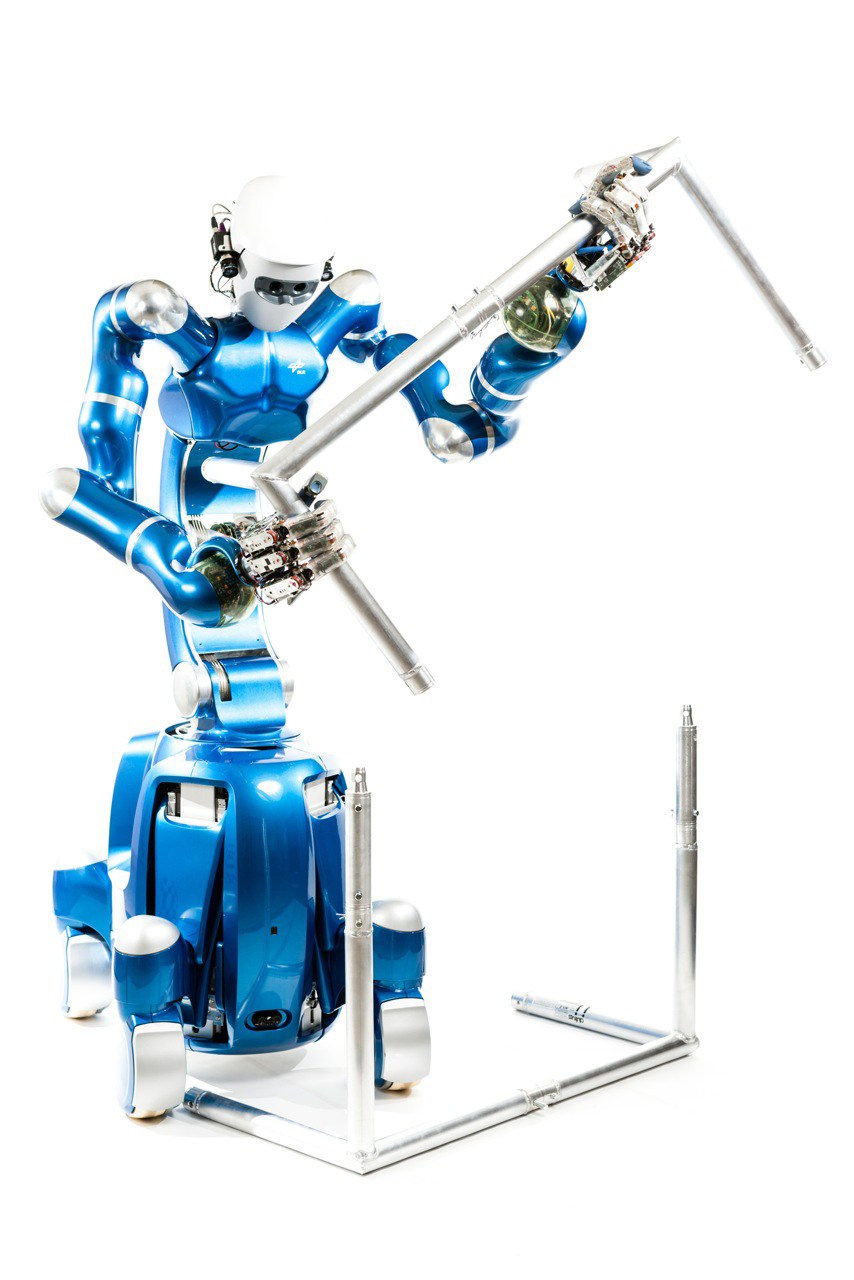
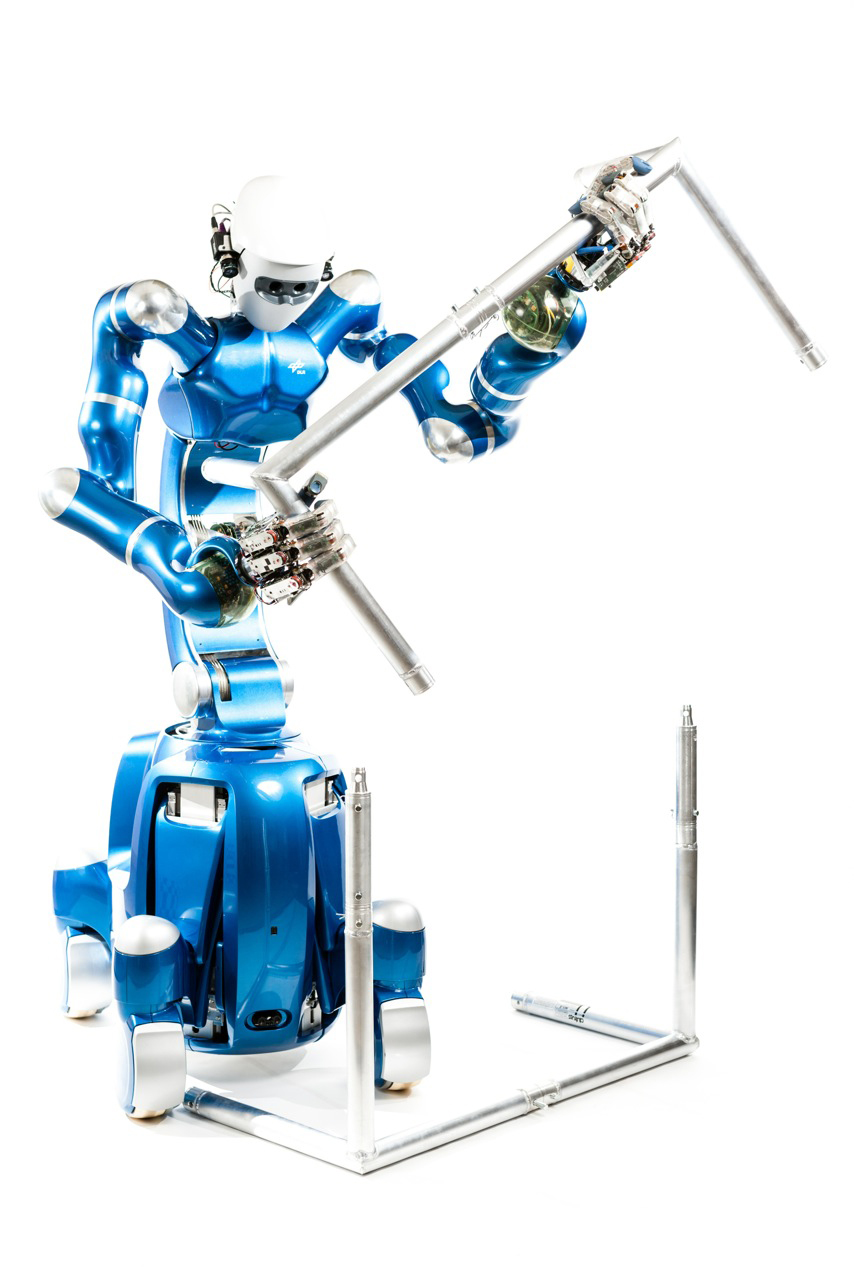
The humanoid robot Agile Justin is a platform for research in learning artificial intelligence (AI) for dextrous manipulation. Areas of application for the system are, in particular, household work and assisting astronauts in space.
The robot is continuously upgraded, its earliest predecessor was presented to the public in 2008.
Tactile skin with resolution: 1-5cm on body & 2mm on hands
Computing: onboard: 4x Intel Xeon Quadcore
External
GPGPU server & Cloud access
System description
Agile Justin is one of the worldwide most advanced humanoid robots for mobile manipulation. It is equipped with sensorial and motor skills coming close to the human. DLR’s Autonomous Learning Lab uses Agile Justin as an ideal platform for research on modern learning artificial intelligence (AI) architectures, esp. generative AI and deep reinforcement learning (RL). The lab investigates learning as the core principle in perception, modeling and action in autonomous systems, which operate in complex and perpetually changing environments. Its most important upgrades compared to Rollin’Justin are the high resoultion tactile skin on the fingertips and the whole body, the wirelessly coupled large computing resources with a CPU und GPU cluster and the realtime distributed communication framework aRDx , developed specifically for the development of learning AI applications.
J. Pitz, L. Röstel, L. Sievers, and B. Bäuml. Dextrous tactile in-hand manipulation using a modular renforcement learning architecture. In Proc. IEEE International Conference on Robotics and Automation, 2023.
Lennart Röstel, Leon Sievers, Johannes Pitz, and Berthold Bäuml. Learning a state estimator for tactile in-hand manipulation. In Proc. Int. Conf. Intelligent Robots and Systems, 2022
Leon Sievers, Johannes Pitz, and Berthold Bäuml. Learning purely tactile in-hand manipulation with a torque-controlled hand. In Proc. IEEE International Conference on Robotics and Automation, 2022.
Johannes Tenhumberg and Berthold Bäuml. Massively speeding up optimization-based motion planning through deep learning. In Proc. Int. Conf. Intelligent Robots and Systems 2022.
Dominik Winkelbauer and Berthold Bäuml. A two-stage learning architecture that generates high-quality grasps for a multi-fingered hand. In Proc. Int. Conf. Intelligent Robots and Systems, 2022.
Agile Justin performing purely tactile dextrous in-hand manipulation. The strategy is learned from scratch in simulation using modern reinforcement learning methods.




{kind=link}
{kind=link}
{kind=link}
{kind=link}