
laden
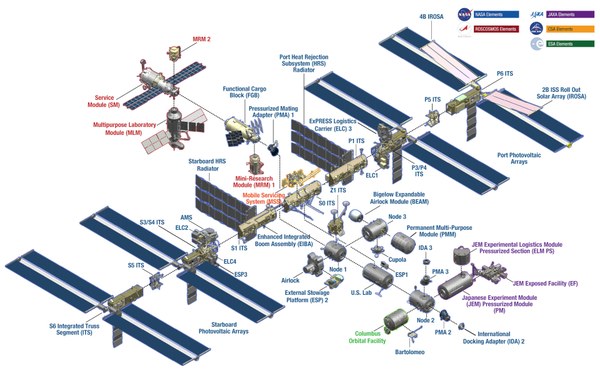
Internationale Raumstation ISS


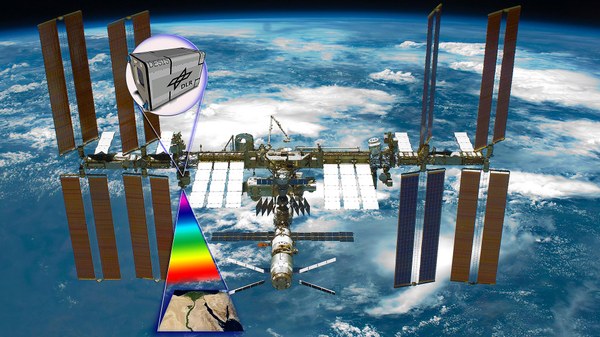
Erdbeobachtung von der ISS aus
Mit MUSES ("Multi-User-System for Earth Sensing") als erster kommerzieller Erdbeobachtungplattform auf der ISS wird die Forschungskapazität auf der Raumstation weiter erhöht. Das DLR entwickelt und liefert dafür ein erweitertes Nah-Infrarot-Spektrometer, das zukünftig unter anderem wertvolle Informationen über die Atmosphäre der Ozeane und deren bio-geophysikalische Zusammensetzung liefert.

AMS geht auf Teilchenjagd
Außen an der ISS angebracht geht der Teilchendetektor Alpha-Magnet-Spektrometer (AMS) auf die Suche nach der Dunklen Materie. AMS sitzt an der Außenseite der Internationalen Raumstation ISS. Das vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) geförderte Projekt zeichnet jährlich 16 Milliarden Teilchen der kosmischen Strahlung auf.














{kind=link}
{kind=link}
{kind=link}