DLR Hand II is a reliable, flexible and powerful multisensory hand – on Rollin' Justin – combined with the lightweight arms it is an excellent platform for two hand manipulation.
Technical data
Size:
30cm × 15cm × 15cm
Weight:
1,8kg
Degrees of freedom:
13 with 3 each finger
Payload:
30N perpendicular to extended finger
Power supply:
24V DC (20A)
Speed:
360°/s joint velocity
Sensors:
3 DMS based torque sensor each finger
3 joint position sensors each finger
3 motor position sensors each finger
multiple temperature sensors
Features:
Modular concept
Quick release adapter
All four fingers are identical and can be exchanged among themselves
System description
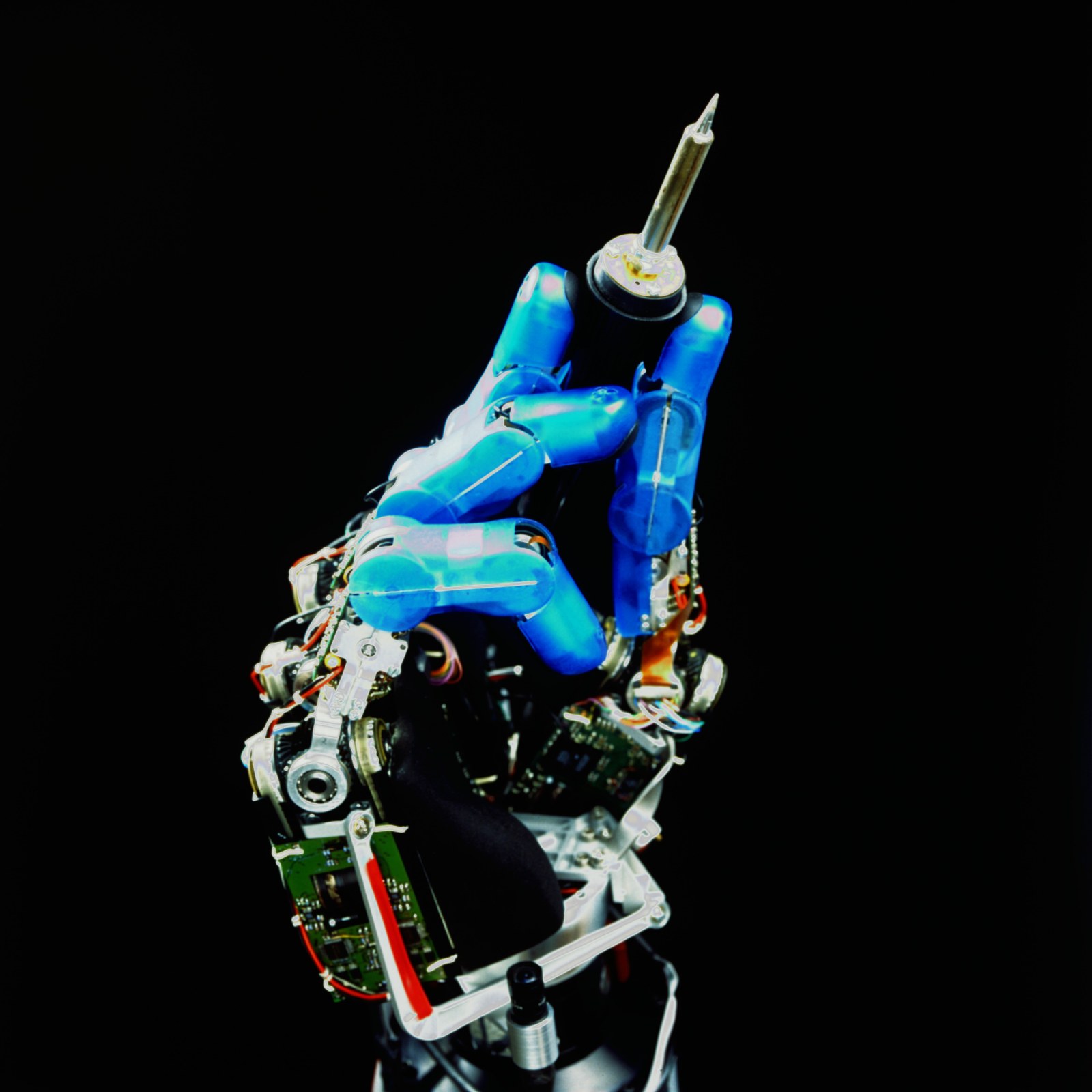
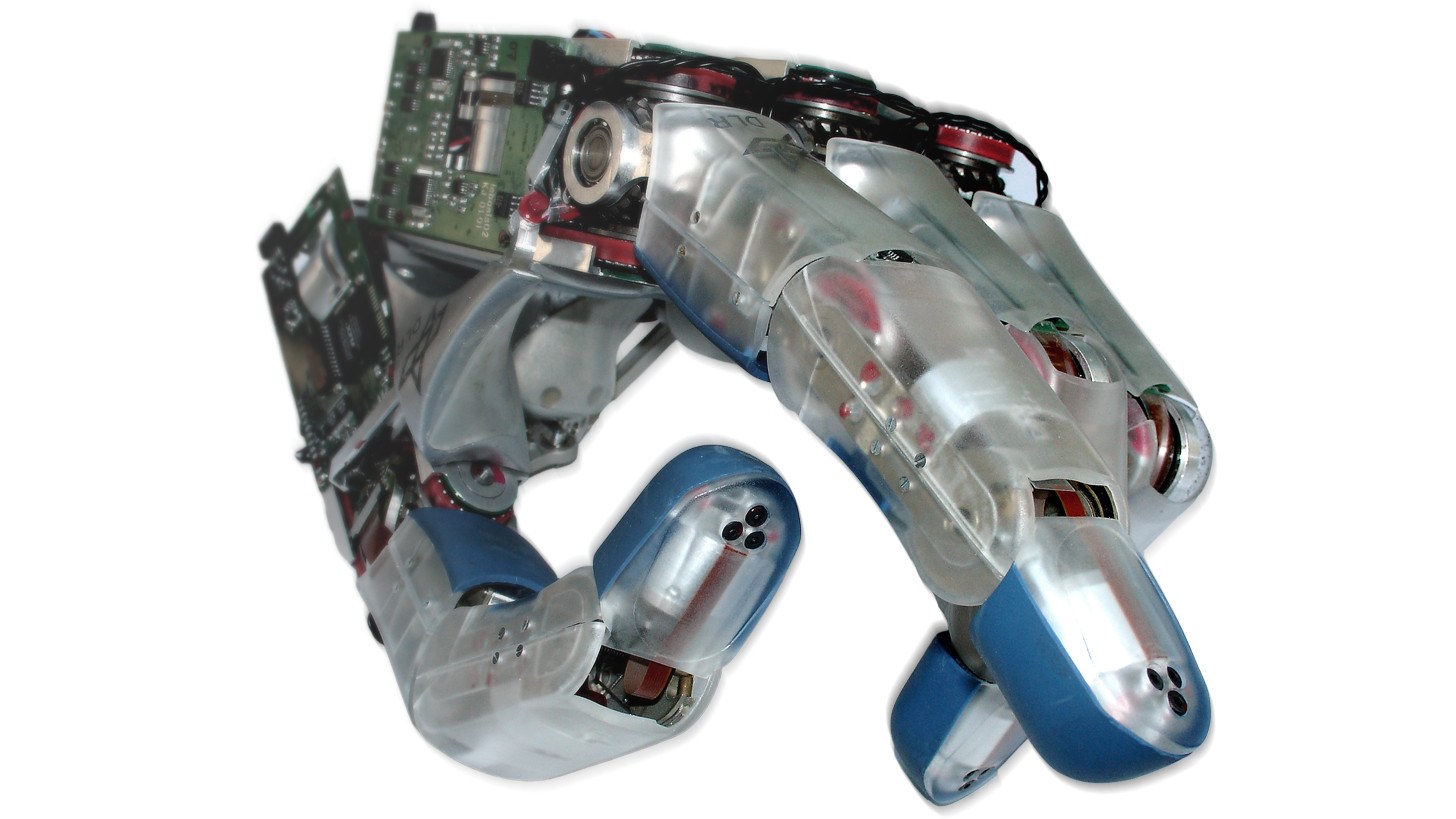
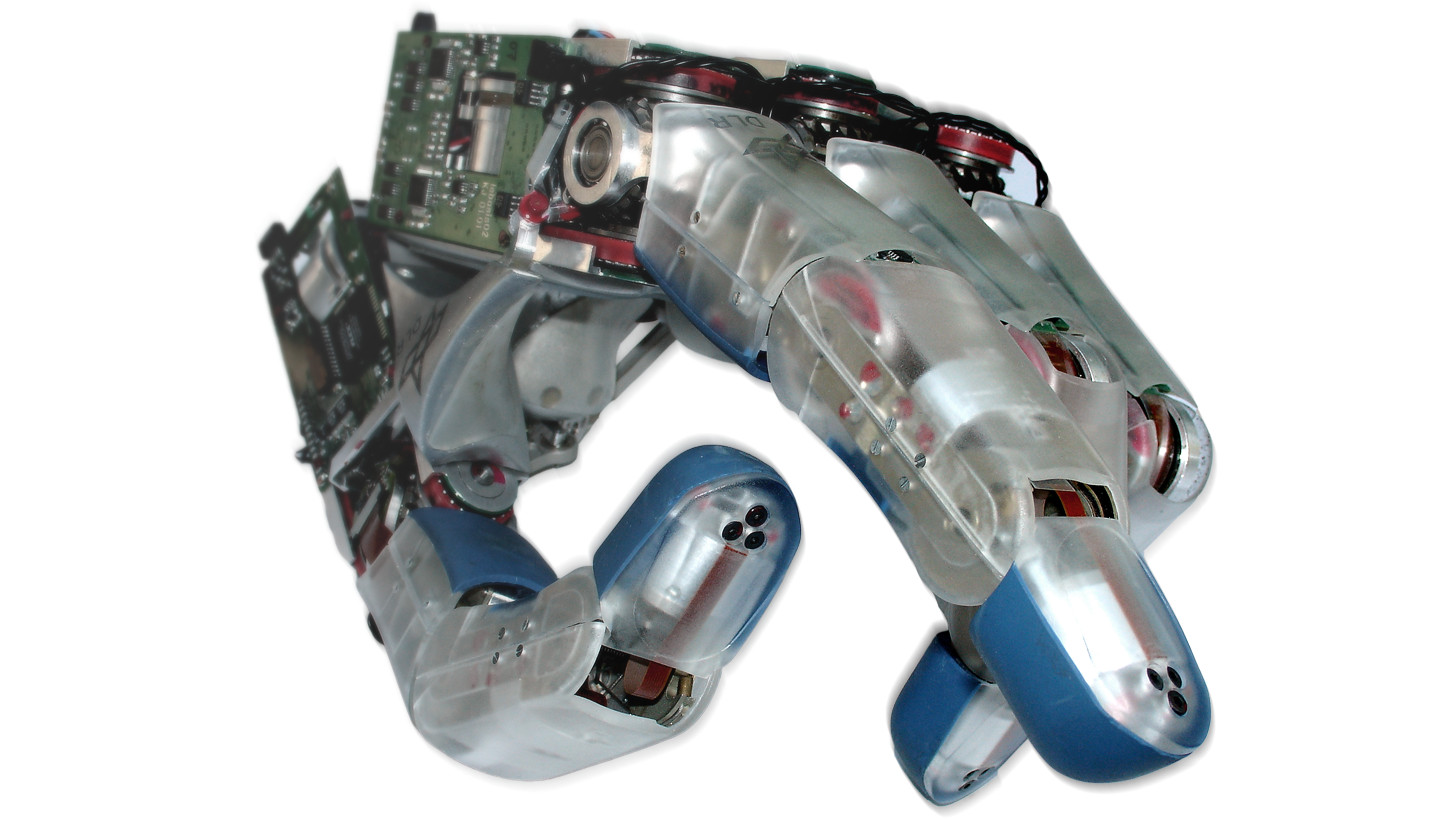
The DLR Hand II is an anthropomorphic dexterous grasping and manipulation system. The hand consists of four identical fingers with four joints and three degrees of freedom each. An additional degree of freedom in the palm allows the hand to adjust perfectly for either stable grasping or fine manipulation. Complete integration of the actuation system, the sensors and the communication electronics in the hand leads to maximum flexibility and allows easy interfacing to different robots. Numerous sensors allow the precise control of the hand parallel to a very sensitive feed-back of forces and finger positions. This is the prerequisite for dexterous telemanipulation. Similar to a human acting with her hands, very different a priori unknown objects have to be grasped and manipulated and various tasks have to be accomplished in an unknown environment. Examples are opening and closing doors and drawers, operating devices, and using tools. The human hand is the template for the design of the anthropomorphic DLR robot hand which is a universal dexterous grasping and manipulation tool for service robotics. Main use chase for the DLR Hand II is two handed manipulation at the humanoid Rollin' Justin. There concepts for hand arm coordination are evaluated. Also Dynamic grasp acquisition and manipulation is a research field. For further robobs hand reducing the complexitiy is a important goal to bring the Robot in household. On Hand II differnt rudimants are explored.
HAND II
Torque sensors in the joints of the hand allow to grasp objects precize and safe.
Butterfass et al., "DLR-Hand II: Next Generation of a Dextrous Robot Hand", in Proc. of the 2001 IEEE International Conference on Robotics and Automation (ICRA), Seoul, Korea, pp. 109-114, May 2001. [elib]
Borst et al., "DLR Hand II: Experiments and Experiences with an Anthropomorphic Hand", in Proc. of the 2003 IEEE International Conference on Robotics and Automation (ICRA), Taipei, Taiwan, pp. 702-707, September 2003. [elib]
Butterfaß et al.: "DLR's Multisensory Hand Part I: Hard- and Software Architecture", Proc. of the IEEE International Conference on Robotics and Automation (ICRA), Leuven, Belgium, 1998. [elib]
Liu et al.: "DLR's Mulitsensory Articulated Hand Part II: The Parallel Torque/Position Control System", Proc. of the IEEE International Conference on Robotics and Automation (ICRA), Leuven, Belgium, 1998. [elib]


{kind=link}
{kind=link}
