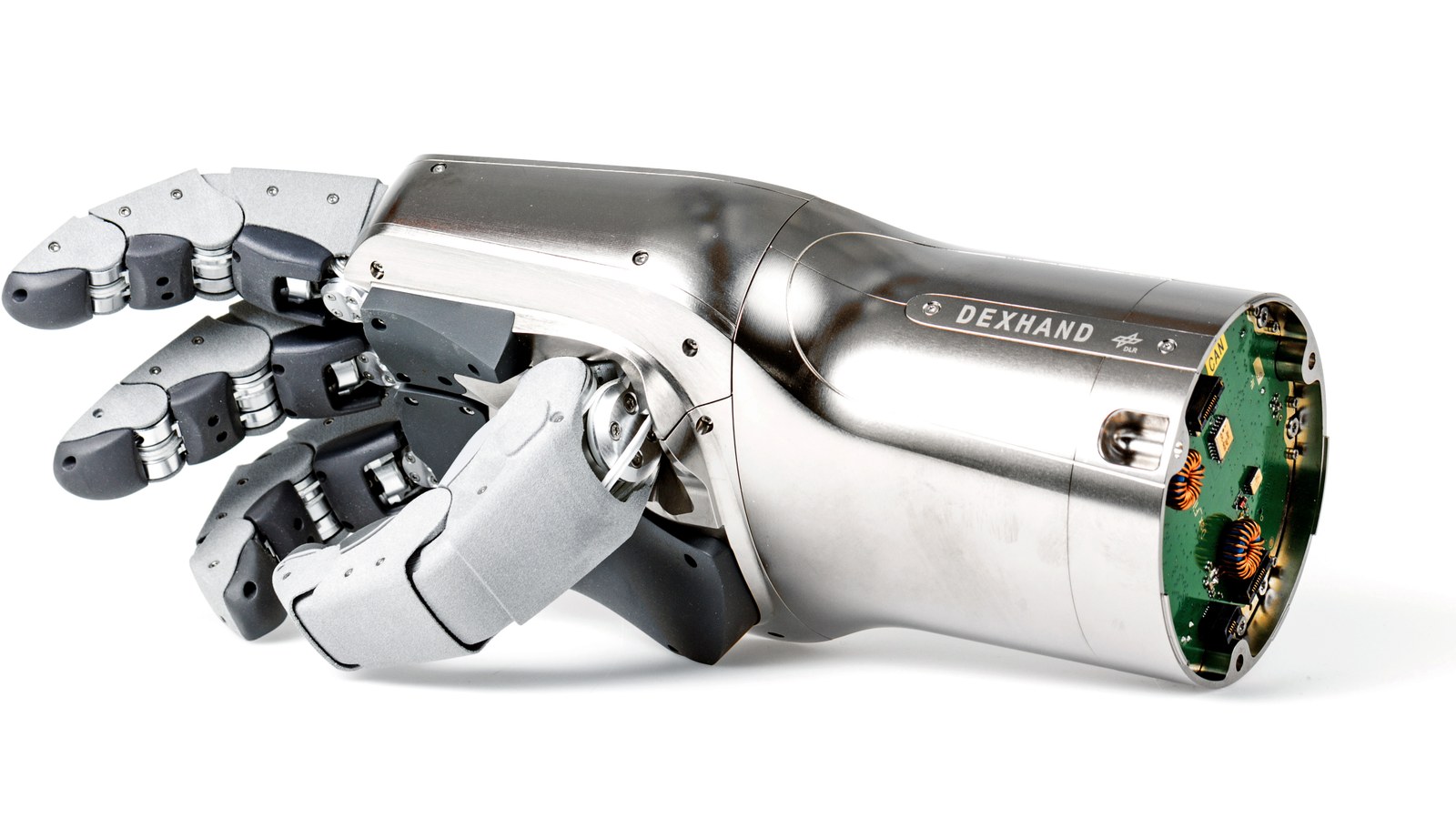
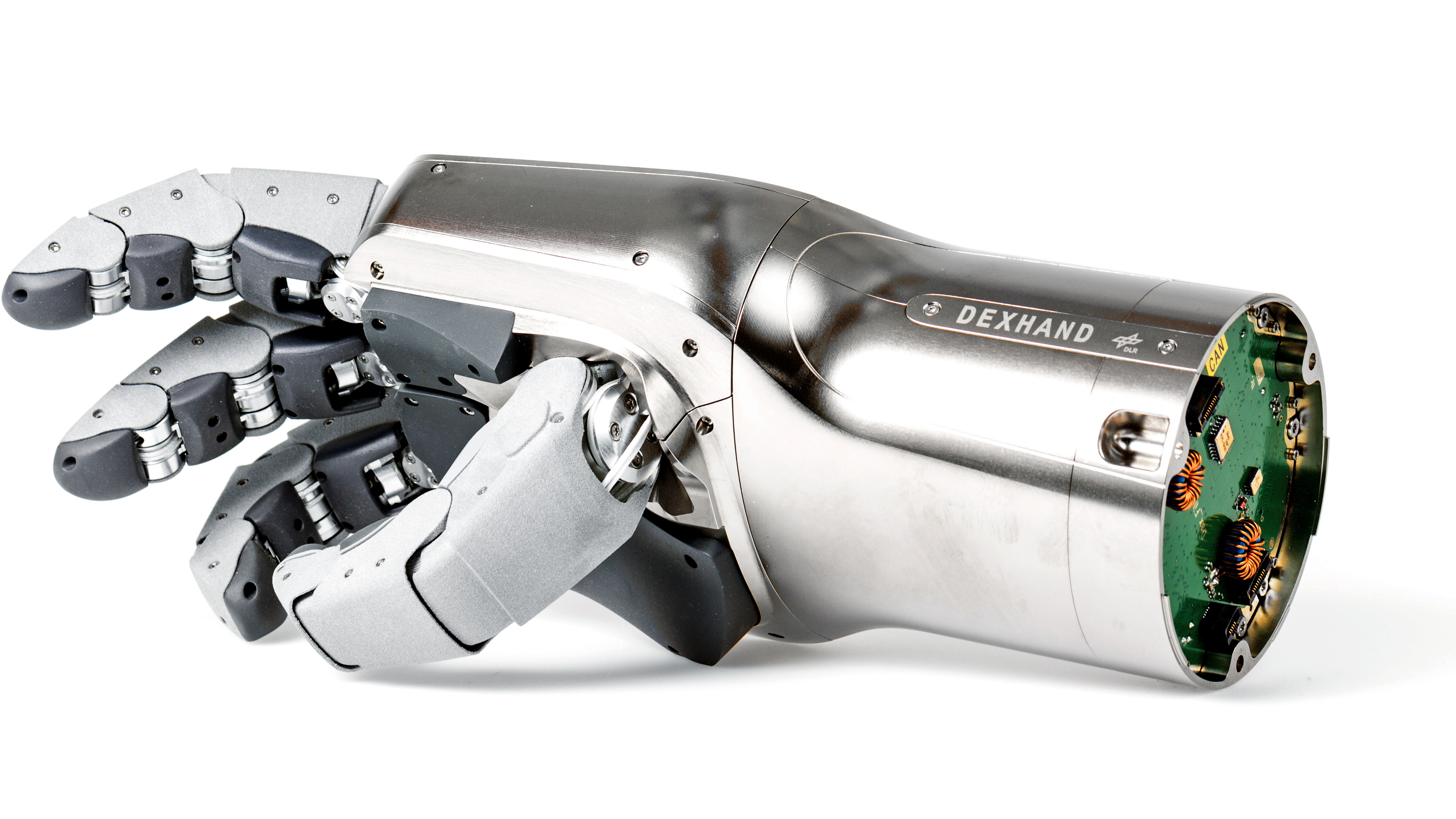
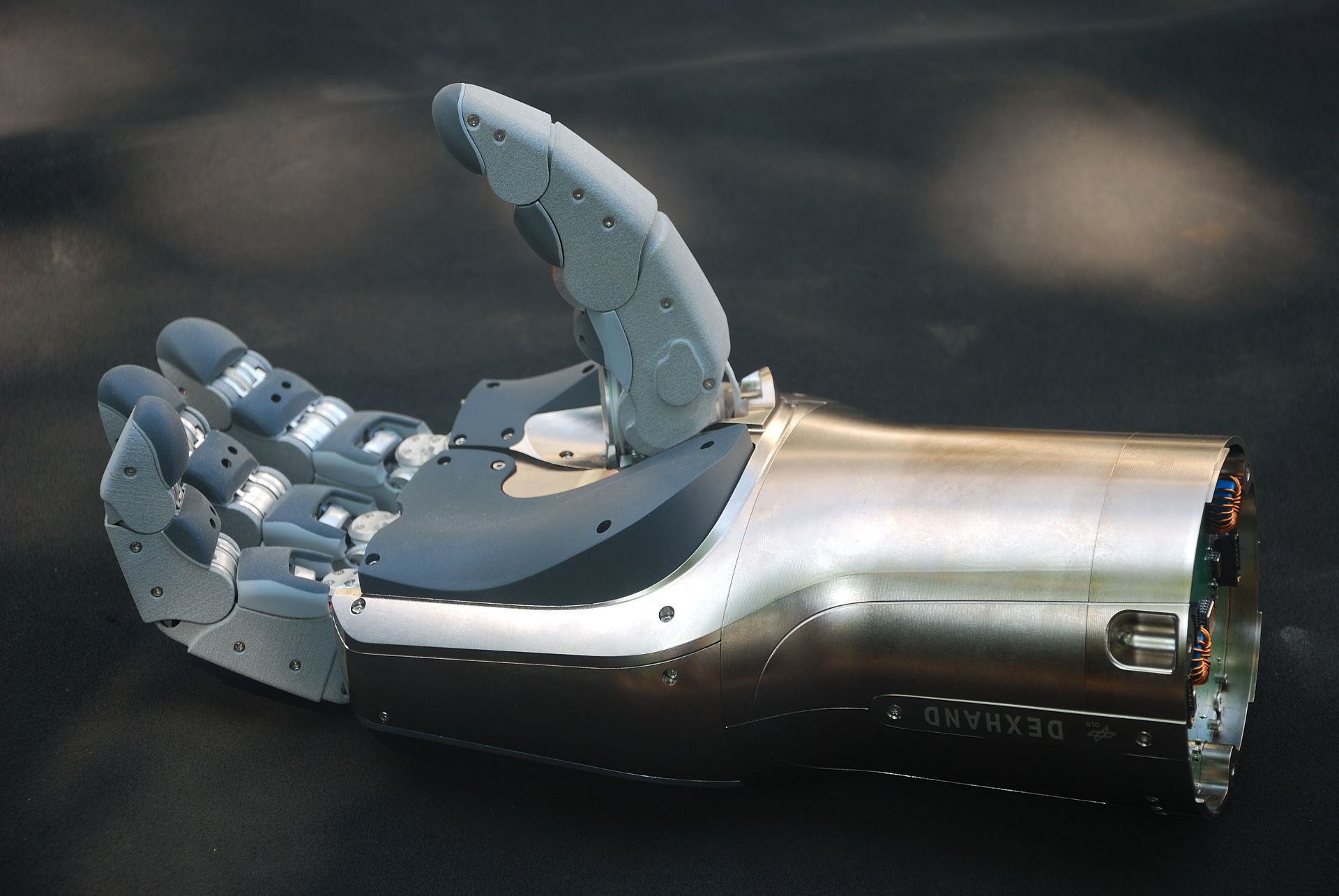
DEXHAND (2012–2015)
Die DEXHAND ist eine mehrfingrige Hand, die für den Serviceeinsatz (On Orbit Servicing) im Weltraum entwickelt wurde. Dank ihrer Feinfühligkeit und Fingerfertigkeit ist sie ein hervorragendes Werkzeug um die komplexe Aufgaben zu erledigen, die bei der Inspektion und Reparatur fragiler Teilkomponenten anfallen.
Im Jahr 2012 wurde die DEXHAND erstmals der Öffentlichkeit präsentiert.
Technische Daten
| | |
|---|
Größe: | 0,35 m × 0,20 m × 0,15 m |
Gewicht: | 4 kg |
Freiheitsgrade: | 12 |
Sensorik: | 12 Gelenkdrehmomentsensoren |
Energieversorgung: | 18 V – 28 V, 3A |
Kommunikation: | |
Rechner: | Embedded DSP |
Besonderheiten: | - Weltraumqualifizierbar (robust gegenüber Strahlung)
- Aktuierung über Elektromotoren mittels Sehnen
|
Systembeschreibung
Die Robotik ist eine Schlüsseltechnologie in der Raumfahrt, komplexe robotische Systeme müssen jedoch trotz Kompaktheit und Leichtbau den Belastungen durch den Einsatz im Weltraum (Temperatur, Vakuum, radioaktive Strahlung, Schmiermittel, Vibration und Schockbelastung) widerstehen. Mit der ESA wird der Einsatz von telemanipulierten Systemen auf der Internationalen Raumstation (ISS) zur Unterstützung von Astronauten untersucht. Um die Werkzeuge, die für Astronauten entwickelt wurden, nutzen zu können, hat die DEXHAND die Größe eines Handschuhs für Außenbordeinsätze. Die Drehmomentmessung und Impedanzregelung ermöglichen feinfühlige Manipulation, die Einlernzeiten werden durch eine intuitive Bedienerschnittstelle verkürzt. Da Komplexität und begrenzter Bauraum nicht mit raumfahrtqualifizierten Bauteilen erreicht werden können, untersucht das DLR auch die Verwendung von Standardkomponenten.
Veröffentlichungen
- Chalon et al., "Dexhand: A Space qualified multi-fingered robotic hand", in Proc. of the 2011 IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, pp. 2204-2210, May 2011.





{kind=link}
{kind=link}
{kind=link}
{kind=link}