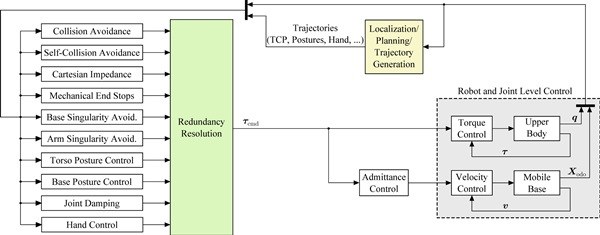
Eine reaktive, mobile Manipulation mit einer Vielzahl an gleichzeitigen Aufgaben kann realisiert werden, indem man dem Roboter eine Aufgabenhierarchie aufprägt. Dabei stellen die sogenannten Nullraumprojektionen eine hervorragende Möglichkeit dar, eine strikte Hierarchie umzusetzen. Aufgaben, die in der Prioritätenliste weiter oben stehen, werden dabei ausgeführt, wobei niederpriore Aufgaben nur erfüllt werden, sofern sie die wichtigeren nicht stören oder behindern. In einer solchen Aufgabenhierarchie an Justin wurden folgende Aspektklassen berücksichtigt:
Sicherheitsaspekte
Physikalische Beschränkungen
Aufgabenausführung
Weitere Optimierungskriterien
Das Konzept kombiniert mehrere unabhängig voneinander entwickelte Methoden (siehe Signalflussplan oben). Es ermöglicht sichere und effiziente Mensch-Roboter-Interaktion und stellt einen Kernpunkt für die künftige Servicerobotik dar.
Sichere interaktion mit dem Menschen: Nachgiebigkeit durch Drehmomentregelung
Alexander Dietrich, Thomas Wimböck, Alin Albu-Schäffer, and Gerd Hirzinger, "Reactive Whole-Body Control: Dynamic Mobile Manipulation Using a Large Number of Actuated Degrees of Freedom",IEEE Robotics & Automation Magazine: Special Issue on Mobile Manipulation, vol. 19, no. 2, pp. 20-33, June 2012.
Alexander Dietrich, Christian Ott, and Alin Albu-Schäffer, "Multi-Objective Compliance Control of Redundant Manipulators: Hierarchy, Control, and Stability"in Proc. of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, November 2013, pp. 3043-3050.
Alexander Dietrich, Thomas Wimböck, and Alin Albu-Schäffer, "Dynamic Whole-Body Mobile Manipulation with a Torque Controlled Humanoid Robot via Impedance Control Laws" in Proc. of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, USA, September 2011, pp. 3199-3206.
Alexander Dietrich, Alin Albu-Schäffer, and Gerd Hirzinger, "On Continuous Null Space Projections for Torque-Based, Hierarchical, Multi-Objective Manipulation",in Proc. of the 2012 IEEE International Conference on Robotics and Automation, St. Paul, USA, May 2012, pp. 2978-2985.