
Herausragende Leistung beim SpaceBot Camp 2015


{kind=link}
Das DLR-Robotik und Mechatronik Zentrum (RMC) des Deutschen Zentrums für Luft- und Raumfahrt (DLR) hat als Team RMexplores! an der SpaceBot Camp Präsentation im November 2015 mit großem Erfolg teilgenommen. Das SpaceBot Camp, welches durch die DLR Raumfahrtbehörde organisiert wurde, stellte ähnliche Herausforderungen wie die DARPA Robotics Challenge in den USA. Der Fokus des SpaceBot Camp liegt auf der Autonomie robotischer Systeme, insbesondere im Kontext der Exploration und Manipulation in unstrukturierten, zuvor unbekannten Umgebungen. Ziele des Spacebot Camp waren die Förderung von Innovationen, Forschung und Entwicklung in der Robotik. Zehn Teams aus Universitäten und Forschungseinrichtungen haben sich an einer anspruchsvollen Aufgabe versucht: Ein Roboter sollte eine mondartige Umgebung erkunden, zwei Objekte finden und diese an einem dritten Objekt montieren. Die gesamte Aufgabe musste innerhalb eines Zeitfensters von sechzig Minuten gelöst werden. Die Aufgabenstellung erforderte zudem ein hohes Maß an Autonomie der Roboter, da die komplette Kommunikation zum System um zwei Sekunden in jede Richtung verzögert war. Zudem konnten nur während begrenzter Zeitfenster überhaupt Kommandos von einer Bodenstation zum Rover gesendet werden. Dadurch beschränkte sich die Arbeit der Bodenstation die meiste Zeit auf eine Überwachung des Roboters mit nur sehr begrenzten Eingriffsmöglichkeiten.
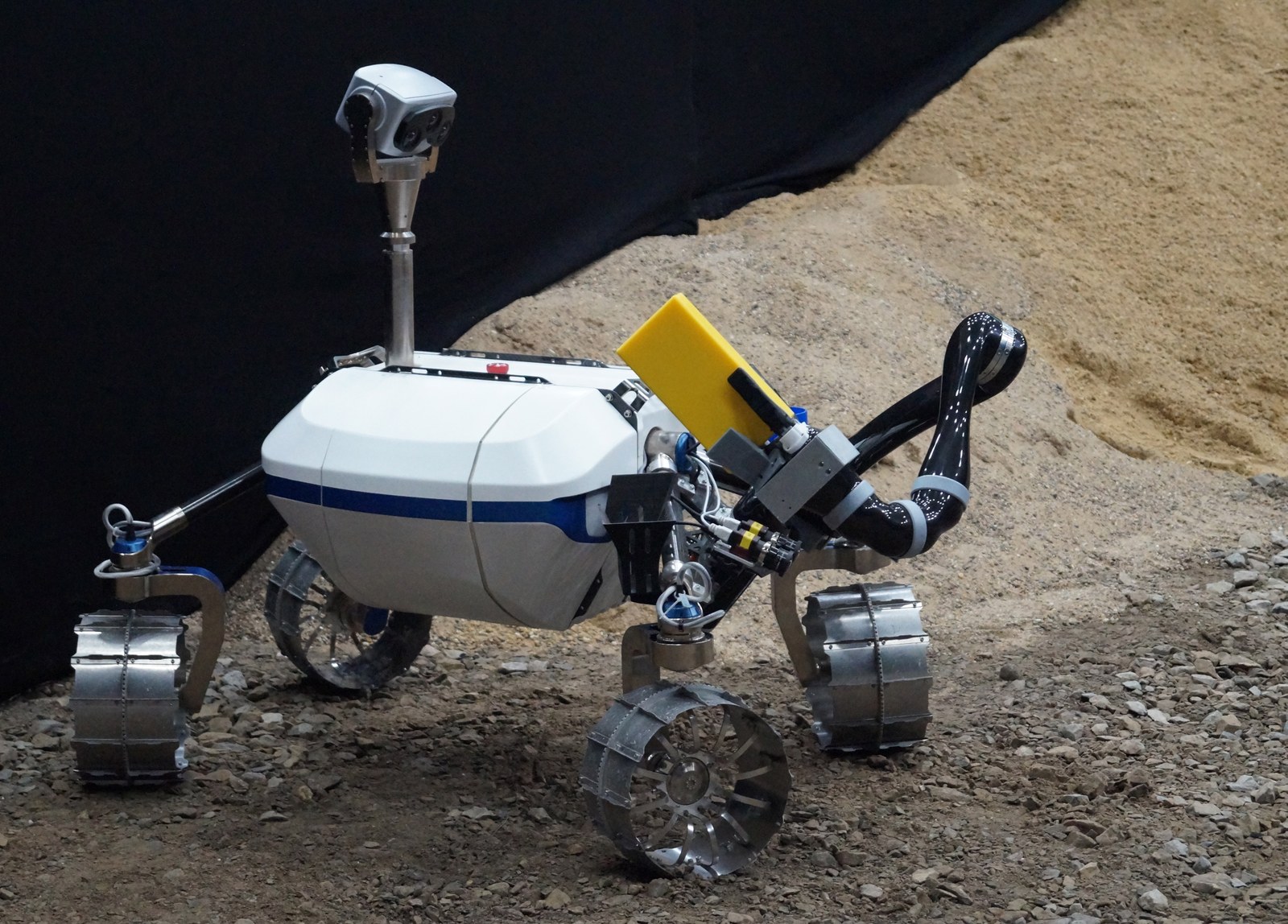
Unser Rover, die Light Weight Rover Unit (LRU), wurde als Konzept für ein Mondfahrzeug entworfen. Er ist aufgrund seiner vier unabhängigen Räder sehr manövrierfähig: Jedes Rad besitzt jeweils einen separaten Lenk- und Antriebsmotor. Zudem besitzt der LRU einen hinten angebrachten, kraftgeregelten Roboterarm, der ihm das Aufsammeln und die Montage von Objekten ermöglicht. Während der Roverkörper sowie der Arm aus terrestrischen Komponenten aufgebaut wurden, zielt das gesamte Rover-Fahrwerk sowie die Pan/Tilt Einheit auf weltraumqualifizierbare Komponenten und Module ab. Dies ermöglicht es dem DLR, diese Hardware- und Softwarekomponenten für zukünftige Weltraumeinsätze weiter zu entwickeln.
{kind=link}
Ähnlich wie bei tatsächlich im Weltraum agierenden Rovern nimmt der LRU die Umwelt ausschließlich mit Kameras wahr. Seine wichtigsten Sensoren sind drei Kameras auf der Pan/Tilt-Einheit: Zwei erzeugen Stereo-Bilder für die Hindernisvermeidung, Kartenerstellung und Navigation, wohingegen die dritte Kamera zusätzliche Farbinformation zur Objektdetektion liefert. Ein hinten angebrachtes, zusätzliches Stereokamerapaar ermöglicht dem LRU eine präzise Objektlokalisierung im Nahbereich für die Manipulation von Objekten mit seinem Roboterarm. Die Autonomie des Rovers wird durch eine Vielzahl hochentwickelter Software-Module ermöglicht. Dazu wurden von uns Komponenten zur Selbstlokalisierung, Erstellung lokaler und globaler Karten, reaktionsschneller Hindernisvermeidung, Pfadplanung, Manipulation, Objekterkennung, Interprozesskommunikation und Missionsteuerung entwickelt und integriert. Daher interagieren und kommunizieren an Bord des LRU mehr als hundert Softwarekomponenten um das autonome Verhalten des Roboters zu steuern.
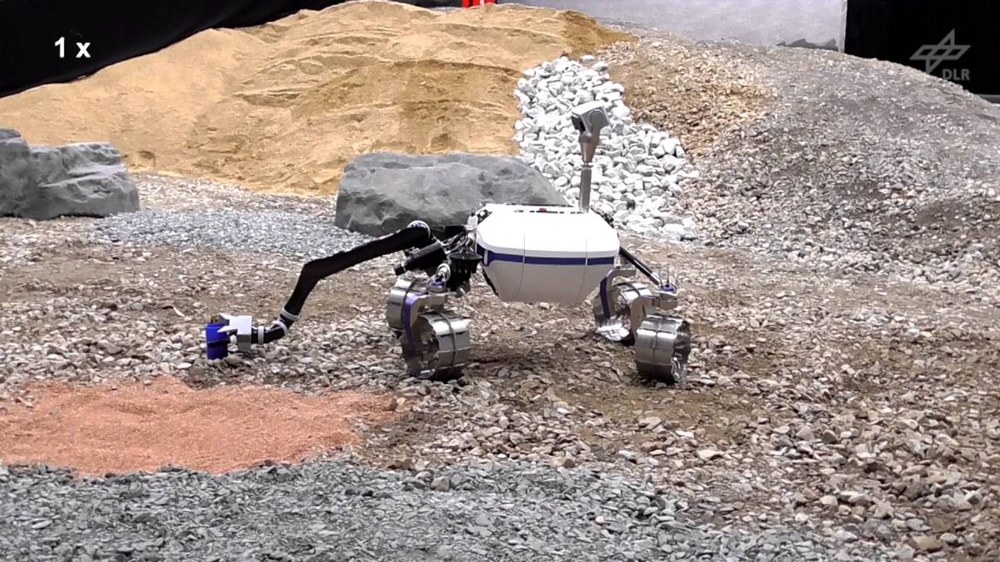
Das SpaceBot Camp in Hürth bei Köln verwandelte ein Filmstudio in eine Mondlandschaft. Jedes der zehn teilnehmenden Teams hatte zwei Tage um ihre(n) Roboter vorzubereiten. Daraufhin folgte die Präsentation ihres Systems über sechzig Minuten vor einem öffentlichen Publikum. Ein Bodenstations-Team durfte mit dem Roboter kommunizieren, befand sich aber in einem abgetrennten Raum und hatte somit keinen Sichtkontakt zum Wettkampfbereich. Zudem wurde auf jegliche Kommunikation vom und zum Rover eine künstliche Verzögerung von zwei Sekunden pro Richtung aufgeschaltet. Dies entspricht in etwa der realen Kommunikationsverzögerung zwischen Erde und Mond. Des Weiteren wurde der Uplink, also die Kommunikationsrichtung von der Bodenstation zum Roboter, nahezu durchgehend blockiert. Einzige Ausnahme bildeten bis zu drei fünfminütige Checkpoints. Diese Beschränkung der manuellen Eingriffsmöglichkeiten durch die Bodenstationscrew erlaubte ihr den größten Teil der Missionszeit ausschließlich eine passive Überwachung des autonomen Verhaltens des Roboters.

{kind=link}
Während sich viele Teams dazu entschieden, diese anspruchsvollen Regeln zur Beschränkungen der Kommunikation für ihre Präsentationsläufe aufzuweichen, stellten wir uns von Anfang an den Herausforderungen der Kommunikationsverzögerung und des blockierten Uplinks. Wir waren das einzige Team, das alle Aufgaben innerhalb der ursprünglich vorgegebenen Spezifikation erfüllen konnte. Unser LRU erreichte alle Missionsziele in der Hälfte der Zeit und zudem vollständig autonom. Die einzigen Daten, die wir während der gesamten Missionszeit von der Bodenstation an unseren Rover sendeten waren vier high-level Befehle um die Ergebnisse unserer Objektlokalisierung genau nachzuprüfen, da diese entscheidend für eine korrekte Montage der Objekte sind. Dazu benötigten wir nur einen der drei in den Regeln spezifizierten Checkpoints. Zudem war unser LRU eines der wenigen Systeme, die in der Lage waren, eine steile Rampe vollautonom hinauf und herunter zu fahren - ein Kunststück, das mehrere der anderen Roboter nicht zu versuchen wagten.
Update (2016-04-25): Mittlerweile ist ein Video der Misson online.
Für die Wiedergabe dieses Videos auf Youtube.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.