
Steer-by-wire Joystick


Um den Anforderungen eines Steer-by-Wire-Systems gerecht zu werden, mussten einige Änderungen an der Mechanik und Elektronik des DLR-Joysticks mit Kraftrückkopplung vorgenommen werden.
Mechanik
Die Motor-Getriebe-Kombination wurde geändert, um Kräfte bis zu 20N zu erreichen. Das kardanische Gelenk und der Hebel des Griffs wurden so gestaltet, dass sie höheren mechanischen Belastungen standhalten. Für ein ausfallsicheres Verhalten bei einem Ausfall des Antriebs oder der Elektronik wurden einige Schenkelfedern an jeder Joystick-Achse hinzugefügt, um den Griff in die Ausgangsposition zurückzustellen, wenn er nicht gegriffen wird.
Die Abmessungen des Joystick-Gehäuses wurden so angepasst, dass es in die Armlehne eines Autositzes passt.
Electronik
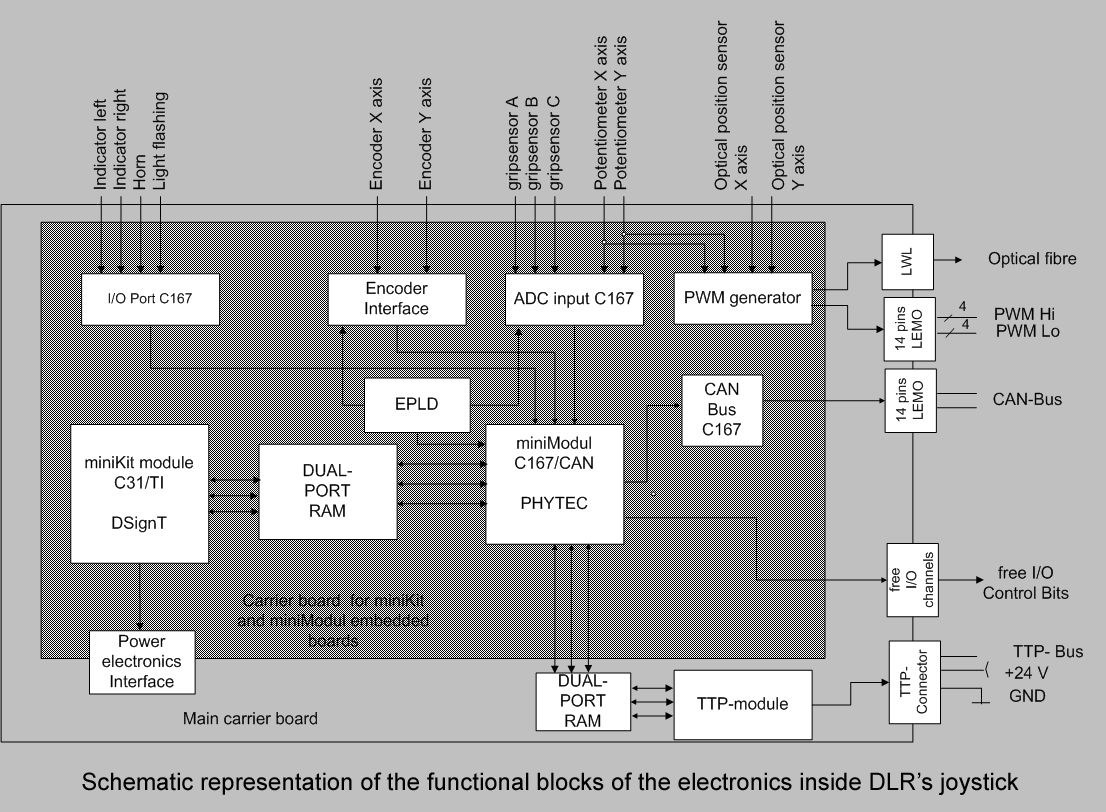
Die in der Steer-by-Wire-Anwendung benötigten Funktionen konnten mit Hilfe von Embedded-Modulen realisiert werden. Auf einem Backplane-System wurden zwei Embedded-Module im Kreditkartenformat eingesetzt: das C31-Modul von Texas Instruments (DSignT GmbH) für die Kraftregelung und das C167-Modul von Siemens (Phytec AG) für die Anbindung der Sensoren und die Buskommunikation (CAN, PWM-Differenzialbus und TTP-Protokoll). Der Datenaustausch zwischen dem C167, dem C31-DSP-Controller und dem TTP-Modul 'piggy-back' wird über zwei asynchrone Dual-Port-RAM-Chips realisiert. Für weitere Informationen siehe auch das Blockschaltbild der DLR-Joystick-Elektronik.
{kind=link}
Schematische Darstellung der Funktionsblöcke der Elektronik im Inneren des Force-Feedback-Joysticks des DLR.