Object Recognition and Scene Analysis
Recognition
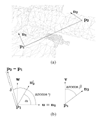
The general problem of recognition from stereo processing, laser scanning, or ordinary image data provides basic environmental information for a robot to act autonomously. Results may be the identity and pose of known objects or object parts in possibly cluttered scenes, as well as grasp points or other generic affordances of objects from a known class.
Related publications:
Christoph Borst, Christian Ott, Thomas Wimböck, Bernhard Brunner, Franziska Zacharias, Berthold Bäuml, Ulrich Hillenbrand, Sami Haddadin, Alin Albu-Schäffer, and Gerd Hirzinger. A humanoid upper-body system for two-handed manipulation. Video Proceedings IEEE International Conference on Robotics and Automation – ICRA 2007, DVD. (Best Video Award)
Christian Ott, Oliver Eiberger, Werner Friedl, Berthold Bäuml, Ulrich Hillenbrand, Christoph Borst, Alin Albu-Schäffer, Bernhard Brunner, Heiko Hirschmüller, Simon Kielhöfer, Rainer Konietschke, Michael Suppa, Thomas Wimböck, Franziska Zacharias, and Gerd Hirzinger. A humanoid two-arm system for dexterous manipulation. Proceedings IEEE-RAS International Conference on Humanoid Robots – Humanoids 2006, pp. 276-283.
Eric Wahl and Gerd Hirzinger. A method for fast search of variable regions on dynamic 3D point clouds. Proceedings Annual meeting of the German Association for Pattern Recognition – DAGM 2005.
Eric Wahl and Gerd Hirzinger. Local point cloud analysis for rapid scene interpretation. Proceedings Annual meeting of the German Association for Pattern Recognition – DAGM 2005.
Ulrich Hillenbrand, Bernhard Brunner, Christoph Borst, and Gerd Hirzinger. The Robutler: a vision-controlled hand-arm system for manipulating bottles and glasses. Proceedings International Symposium on Robotics – ISR 2004, CD.
Ulrich Hillenbrand and Gerd Hirzinger. Object recognition and pose estimation from 3D geometric relations. Proceedings International Conference on Knowledge-Based Intelligent Engineering Systems & Allied Technologies – KES 2000, IEEE, pp. 113-116.
Patrick Wunsch. Modellbasierte 3-D Objektlageschätzung für visuell geregelte Greifvorgänge in der Robotik. Shaker Verlag, Aachen (Germany), 1998.