
MISSIS
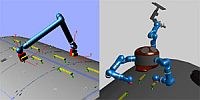

In 2000 the nationally funded study MISSIS (Mobile Inspection and Service System for ISS) aimed at the development of a mobile inspection and service system for the ISS Columbus module. The major goal was to demonstrate advanced technologies for security enhancement of the station while reducing extra-vehicular activities (EVA) and thus reserve more time for other research activities. The study resulted in the MISSIS system that is composed of a fully symmetrical robot (in total 7 DoF) with its primary goal to autonomously carry out inspection tasks by walking along the outer shell of the Columbus module while making use of existing T-handle rails for fixation. The manipulator walking-over operations were supposed to start from its homing position at the balcony platform, serving as a docking station that gives support for additional resources (power and data supply). A major task was scanning of the surface with a stereo camera system, while searching for potential gas leakages. Walk-over requires the design of identical end effectors on each end of the arm with appropriate power supply and data transfer. Manipulator design with kinematic redundancy for these robotic-based scenarios has been performed by using our 3rd generation light-weight modules for joints, links and wrist assembly. Finally a similar walkover and inspection concept was developed for a three-arm system following ESA’s EUROBOT concepts.