Der DLR MIRO ist ein vielseitig einsetzbarer Roboterarm für medizinische Anwendungen, welcher im Jahr 2008 erstmals der Öffentlichkeit präsentiert wurde.
Technische Daten
Größe:
Maximale Armlänge von 1,1 m
Gewicht:
ca. 10 kg
Freiheitsgrade:
7
Nominale Nutzlast:
3 kg
Arbeitsraum:
Optimiert für verschiedene chirurgische Anwendungen
Kombinierbar mit speziell entwickelten Instrumenten (MICA)
Kombinierbar zu MiroSurge, bestehend aus 3 MIRO-Roboterrmen
Systembeschreibung
Der DLR MIRO ist nach dem DLR KineMedic die zweite Generation der am Institut für Robotik und Mechatronik entwickelten, vielseitig einsetzbaren Roboterarme für medizinische Anwendungen. Dank seines geringen Eigengewichts von 10kg und seiner mit einem menschlichen Arm vergleichbaren Größe kann MIRO einem Chirurgen direkt am OP-Tisch assistieren, wo Platz knapp ist. Die Bandbreite an möglichen Anwendungen dieses Roboterarms reicht vom Führen einer Lasereinheit für das exakte Schneiden von Knochenmaterial in der Orthopädie über das Setzen von Pedikelschrauben und roboterassistierte Endoskopführung bis hin zu minimal invasiver Chirurgie.
Robotersysteme in der Chirurgie lassen sich in zwei Hauptgruppen einteilen: spezialisierte und vielseitig einsetzbare Systeme. Spezialisierte Systeme sind entweder auf eine spezielle chirurgische Technik oder die Behandlung eines spezifischen medizinischen Leidens hin ausgerichtet. Im Gegensatz dazu sieht der Designansatz des DLR MIRO und seines Vorgängers KineMedic vor, einen kompakten, schlanken Leichtbauroboterarm als vielseitig einsetzbare Kernkomponente für verschiedene existierende oder zukünftige robotergestützte Prozeduren in der Medizin zu entwickeln.
Durch den Einsatz von spezialisierten Instrumenten und durch Modifikationen der Anwendungsworkflows in der Roboterregelung kann der MIRO bei vielen verschiedenen chirurgischen Eingriffen verwendet werden. Diese Vielseitigkeit wird durch das Design des Roboterarmes selbst sowie durch die Flexibilität der Regelungsarchitektur des Roboters erreicht.
Der DLR MIRO ist ein
leichter,
kinematisch redundanter,
vollständig drehmomentgeregelter Roboterarm, mit einem
Nutzlast-zu-Eigengewicht-Verhältnis von 1:3.
Die kinematische Redundanz der sieben drehmomentgeregelte Gelenke ermöglicht ein flexibleres OP-Setup und kann zur Vermeidung von Kollisionen mit anderen Robotern oder OP-Ausrüstung genutzt werden. Alle Gelenkeinheiten enthalten sowohl Positions- als auch Drehmomentsensoren. Dadurch kann der Roboter impedanzgeregelt verwendet werden, was eine feinfühlige Bewegung des Roboters durch den Chirurgen ("Hands-on Robotik") sowie die Vermeidung unbeabsichtigter Kollisionen erlaubt. Für sehr präzise Manipulation ist alternativ auch ein positionsgeregelter Betrieb des Roboters möglich.
Die enge Zusammenarbeit mit einem technischen System erfordert ein Verstehen dieses System. Daher ist ein zentraler Designaspekt des MIRO Roboters die inhärente Vorhersagbarkeit der Systemhandlungen für den Benutzer. Um dies zu erreichen, wurde eine serielle Kinematik mit sieben Freiheitsgraden, welche denen des menschlichen Arms ähneln, entwickelt und für medizinische Eingriffe optimiert. Die gewählte Robotermorphologie gliedert den MIRO in Schulter (roll-pitch-yaw), Oberarm, Ellenbogen (pitch-roll), Unterarm und Handgelenk (pitch-roll). Innerhalb der drei Gelenkeinheiten schneiden sich jeweils die Achsen der einzelnen Freiheitsgrade.
Der MIRO stellt ein hochgradig integriertes mechatronisches System dar. Neben Motoren, Getrieben und Sicherheitsbremsen enthält der Roboterarm noch Drehmoment- und Positionssensoren, Leistungselektroniken und programmierbare Elektronikkomponenten in jedem Gelenk. Die verschiedenen Gelenkelektroniken sind über einen Hochleistungskommunikationsbus verbunden, was ein Auslagern der Gelenkregelung in externe Versorgungsmodule erlaubt.
Zusätzlich zur klassischen Robotersteuerung entlang einer geplanten Trajektorie, kann der Roboter auch den Soft Robotics Ansatz zur Erfüllung von Aufgaben nutzen. Mit Hilfe der integrierten Drehmomentsensorik kann er impedanzgesteuert und schwerkraftkompensiert betrieben werden. Dies erlaubt es dem Benutzer, direkt mit dem Roboter zu interagieren, da alle externen Kräfte und Momente erfasst und in den Regelungsalgorithmen berücksichtigt werden.
Trivia
Das von Tilo Wüsthoff gestaltete Gehäusedesign des DLR MIRO gewann 2009 den iF product design award in der Kategorie "Advanced Studies".
Der MIRO hat auch einen kurzen Auftritt in einer Szene des Science-Fiction-Films "Ender's Game" (2013).
DLR MIRO an genormter Seitenschiene
Der kompakte und leichte Roboterarm DLR MIRO kann problemlos an den genormten Seitenschienen jedes OP-Tisches befestigt werden.
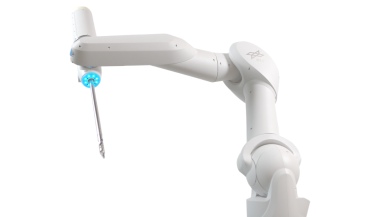
Die Spezialisierung des vielseitig einsetzbaren DLR MIRO für eine bestimmte Applikation erfolgt über das Anbringen eines entsprechenden Instruments (hier einem MICA-Instrument für minimal invasive Chirurgie).
Schlenk et al., "Robot Integrated User Interface for Physical Interaction with the DLR MIRO in Versatile Medical Procedures",Journal of Medical Robotics Research, vol. 3, no. 2, 2018.
Hagn, U., "The Aspect of Versatility in the Design of a Lightweight Robot for Surgical Applications", Ph.D. dissertation, University of Hannover, 2011.
Hagn et al., "Telemanipulators for Remote Minimally Invasive Surgery", IEEE Robotics and Automation Magazine, vol. 15, no. 4, pp. 28-38, December 2008.
Hagn et al., "The DLR MIRO: a versatile lightweight robot for surgical applications", Industrial Robot, vol. 35, no. 4, pp. 324-336, 2008.






{kind=link}