
Preoperative Planning and Registration

Introduction
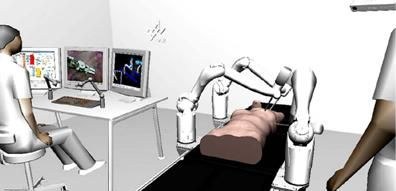
In minimally invasive surgery (MIS) the surgeon works with slender instruments through small incisions. This leads to several benefits compared to open surgery, including: reduced pain and trauma, decreased blood loss, shorter hospital stay and rehabilitation time, and cosmetic advantages. However, operating through small incisions introduces some new challenges for the surgeon:
- The surgical instruments must be maneuvered around an entry point, which results in a loss of intuitive hand-eye coordination. Furthermore, the entry point restricts two of the instrument's degrees-of-freedom (DoF), leaving the surgeon with 4 remaining DoF per instrument to work inside the patient. This makes complicated tasks such as suturing very time consuming.
- The instruments need to be braced against the trocar (a small cylindrical port used to introduce the surgical tools into the patient's body). In this configuration, it can be very difficult for the surgeon to feel contact forces. To help overcome these challenges, telesurgery solutions such as DLR's advanced prototype system for minimally invasive robotic surgery (MIRS) have been developed.
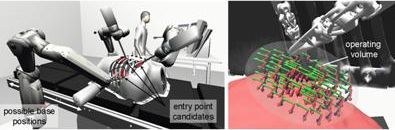
Using robotic assistance in minimally invasive surgical procedures may increase the overall task complexity, setup time, and the potential number of error sources. Furthermore, collision avoidance, joint limits and workspace boundaries need to be guaranteed by a patient-specific optimization of the robotic setup. Preoperative planning done outside the operating room (OR), and computer-assisted setup procedures (inside the OR), aim to address these issues and contribute to an efficient and safe surgical procedure.
Preoperative Planning
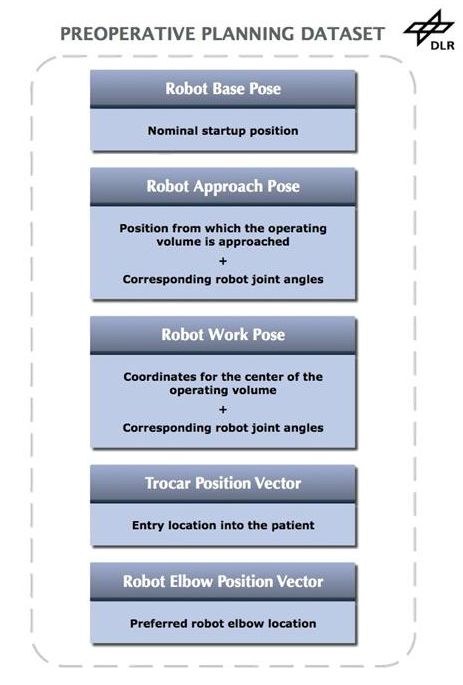
Preoperatively, the surgical task is defined in a virtual reality simulation, based on patient-specific data from, for example: computed tomography (CT), magnetic resonance tomography (MRT), and medical imaging techniques involving surface segmentation. An optimization procedure, which currently utilizes a Genetic Algorithm in combination with gradient-based methodologies, then determines optimal robot positions and entry point locations on the patient's skin for the minimally invasive instruments. The preoperative planning results in a dataset for each robot consisting of the positioning information shown in the image below. This data then needs to be adapted from the virtual world to the real situation in the OR.
Interoperative Setup: transfer of planning results into the OR
The results of the above planning procedure are compared to the patient's actual placement in the OR for further refinement (this process is called patient registration). A surface scan of the patient's upper body is performed using the DLR handheld 3D-Modeller. A robust feature-based algorithm then matches the patient surface with preoperative data. The position of the patient relative to the OR table is also measured. This is accomplished using the same optical tracking system that is used with the 3D-Modeller, in addition to an optical tracking target, which is attached to the operating table. The patient registration and re-planning take only a few minutes. This is an important procedure, since spatial deviations from the preoperative model may have been introduced due to e.g. soft tissue displacement.
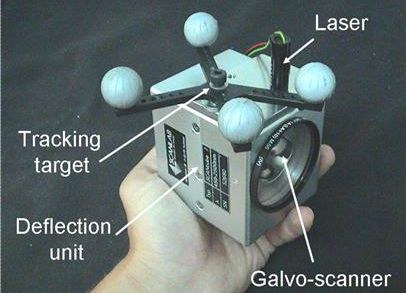
A new patent-pending handheld device called the AutoPointer, an intelligent laser scanner, then projects the optimal setup positions of the robots and the entry point locations for the minimally invasive instruments. The AutoPointer prototype is optically tracked using the ART navigation system (www.ar-tracking.de), allowing its laser projection to maintain a position fix on the patient surface to an accuracy currently within 1mm. Systems with even greater accuracy are currently being planned. The AutoPointer is equipped with position-controlled high-speed galvo-scanners that deflect a laser beam in two axes. A DSP processing board is used to control the scanner. The scanner is fast enough to project a variety of patterns including complex cutting trajectories and multiple symbols simultaneously.
Using the AutoPointer and optically tracked probe measurements (if necessary), the robots are positioned and the trocars set. The final setup data is then made available to the robot control system, so the surgeon can begin the MIRS. Future work will examine post-surgery data processing strategies for developing operation-specific templates to simplify the setup procedures for reoccurring surgical interventions.
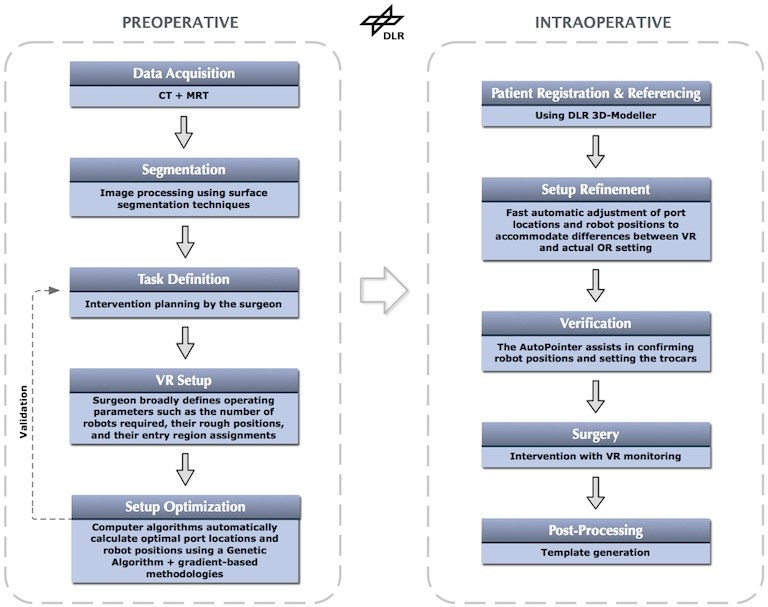
The sequences of pre- and intraoperative steps involved in preparing for minimally invasive robotic surgery are summarized in the figure below.
This pre- and intraoperative planning system is based on important clinical workflow considerations in order to provide a safe, robust and effective approach to MIRS.
Publications
Konietschke, Rainer (2008): Planning of Workplaces with Multiple Kinematically Redundant Robots. Dissertation, Technische Universität München
Konietschke, Rainer; Busam, A.; Bodenmüller, Tim; Ortmaier, Tobias; Suppa, Michael; Wiechnik, J.; Welzel, T.; Eggers, G.; Hirzinger, Gerd; Marmulla, R. (2007): Accuracy Identification of Markerless Registration with the DLR Handheld 3D-Modeller in Medical Applications. In: Prodeedings of CURAC, 6. Jahrestagung, Karlsruhe, 2007-10-11 2007-10-13
Konietschke, Rainer; Busam, A.; Bodenmüller, Tim; Ortmaier, Tobias; Suppa, Michael; Wiechnik, J.; Welzel, T.; Eggers, G.; Hirzinger, Gerd; Marmulla, R. (2007): Potential, Limitations and Challenges of Markerless Registration with the DLR 3D-Modeller in Medical Applications. In: Prodeedings of CARS 2007, 21st International Congress and Exhibition, Berlin, 2007-06-27 2007-06-30
Konietschke, Rainer; Knöferle, Andreas; Hirzinger, Gerd (2007): The Autopointer: A New Augmented-Reality Device for Transfer of Planning Data into the Operating Room. In: Prodeedings of CARS 2007, 21st International Congress and Exhibition, Berlin, 2007-06-27 2007-06-30
Konietschke; Hirzinger, Gerhard (2006): A Registration-Free Intraoperative Procedure to Optimally Position the Ports and the Robots in MIRS. In: Proceedings of 5th World Congress on Biomechanics, 5th World Congress on Biomechanics, München
Konietschke, Rainer; Hirzinger, Gerd (2006): Registration-Free Intraoperative Procedure to Optimally Position the Ports and the Robots in MIRS. In: 5th World Congress on Biomechanics, 5th World Congress on Biomechanics, München, 2006-07 - 2006-08