
Control
The control of DLR Light-weight robot has a hierachic structure with multiple layers having different sampling rates. The inner and fastest one is the motor control loop, followed by joint control, and finally the overall control of the whole robot.
Measuring motor position, joint position and joint torque, the controller is provided with three sensor signals for each joint.
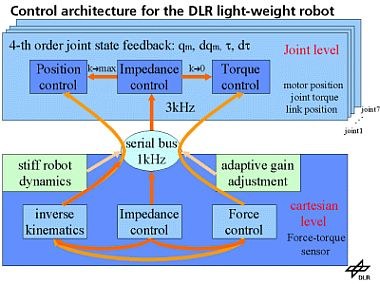

Joint control
In joint mode, different control algorithms are available:
- Position control:
the desired position is commanded to the joint - Torque control:
the desired torque is commanded to the joint - Impedance control with variable stiffness and damping:
It is possible to vary stiffness and damping of each joint by means of control. At the same time the desired joint position is commanded and a torque to compensate gravitation can be taken into account.
Robot control
The control of the whole robot contains the interaction of all seven joints on a higher level. The following features are already implemented:
- Compensation of the robot´s dynamics (contains gravity compensation, mass couplings, coriolis and centrifugal forces)
- Cartesian impedance control: the linear stiffness of the TCP is variable in cartesian coordinates
- Inverse kinematics for a 7-DoF manipulator which are robust against singularities
Task planning
We are using a home-made tool for task planning (called "Aufgaben-orientierte Programmierung", AOP). Complex tasks are composed out of predefined modules. When starting a task, pathplanning and suitable controlers are automatically chosen.