
Sensors


Credit:
Credit:

Credit:
To get a high resolution signal for the joint position, a special joint position sensor has been developed. It measures the absolut joint angle at 0,01°, is working with optical methods and is equipped with an integrated bearing. | |
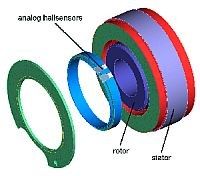
To commutate brushless DC motors a hight resolution motor position sensor has been developed and integrated into the windings of the motor. The measuring principle is based on the measurement of the variation of the rotor´s magnetic field. | |
To get information about the joint torques, a torque sensor is integrated into each link. The displacement of radial beams is measured by strain gauges and is related to the applied torque. The first step of sensor signal analysis is realized on preamplifiers which are integrated in the sensor mechanics. |