
Data Sheet

Credit:
total weight (incl. electronics) | 18 kg |
max. payload | 7 kg |
max. joint speed | 187° /s |
nr. of axes | 7 |
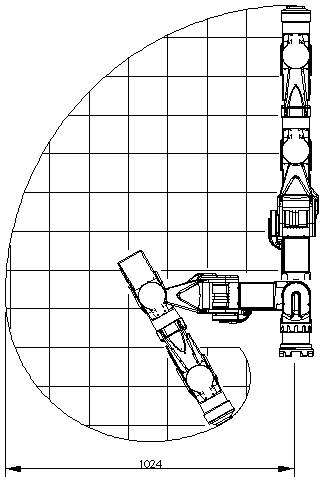
total length | 1024 mm |
motors | Brushless DC |
gears | Harmonic Drive |
sensors (each joint) | 2 position sensors 1 torque sensor |
brakes | electromagnetic safety brake |
power supply | 48V DC, 20 kHz AC |
control | position, torque, impedance control |
electronics | integrated electronics no external rack internal cabling |
Joint 1 | ± 170° | Joint 5 | ± 170° |
Joint 2 | ± 100° | Joint 6 | ± 130° |
Joint 3 | ± 120° | Joint 7 | ± 170° |
Joint 4 | ± 130° |