
Start und Landung von VTOL UAVs auf bewegtem Untergrund

{kind=link}
Unbemannte, autonome Helikopter sind in der Lage auf engstem Raum vertikal zu starten und zu landen und gehören damit zur Gruppe der vertical take-off and landing unmanned aerial vehicles (VTOL UAVs).
VTOL UAVs finden heute bereits in vielen zivilen Bereichen Anwendung, beispielsweise für Luftbildaufnahmen, zur Beobachtung von Katastrophengebieten sowie zur Inspektion von unzugänglichen Industrieanlagen. Durch die anhaltende Weiterentwicklung der Flugplattformen ist ihr Einsatz unter schwierigen Witterungsbedingungen in den Bereich des Möglichen gerückt. Die Suche nach Schiffbrüchigen auf hoher See, die Beobachtung von Packeis in der Arktis, sowie die Inspektion von Off-shore Windrädern sind Einsatzgebiete, die zudem eine Landung auf einem Schiff erfordern können. Die Landung bei starkem Wind und auf bewegtem Untergrund stellt besondere Anforderungen an die Sensorik und den Autopiloten der UAVs und ist daher ein Forschungsschwerpunkt der Flugroboter-Gruppe des DLR-Instituts für Robotik und Mechatronik.
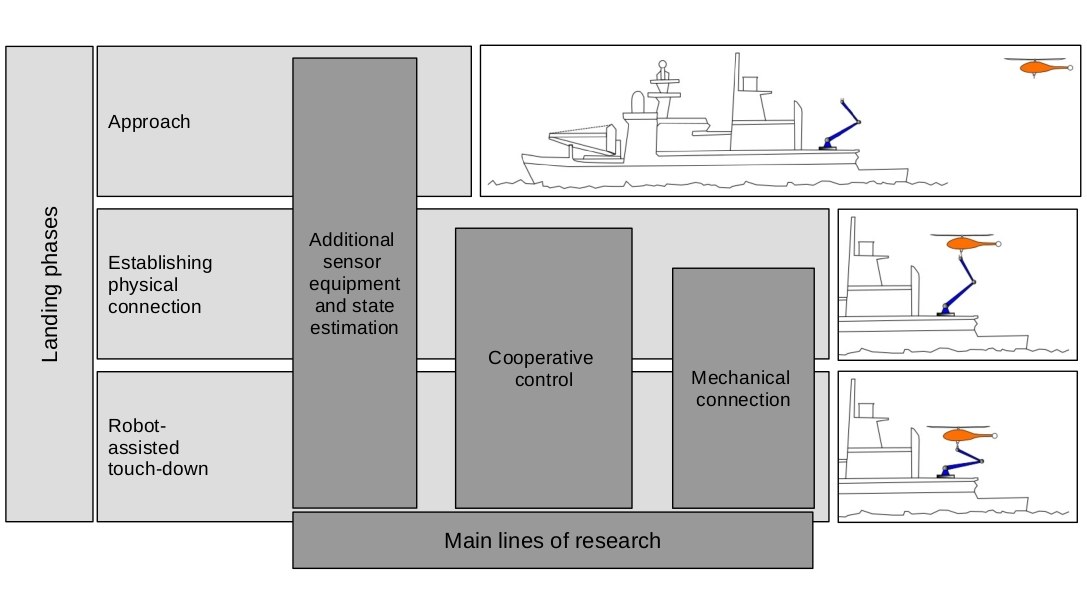
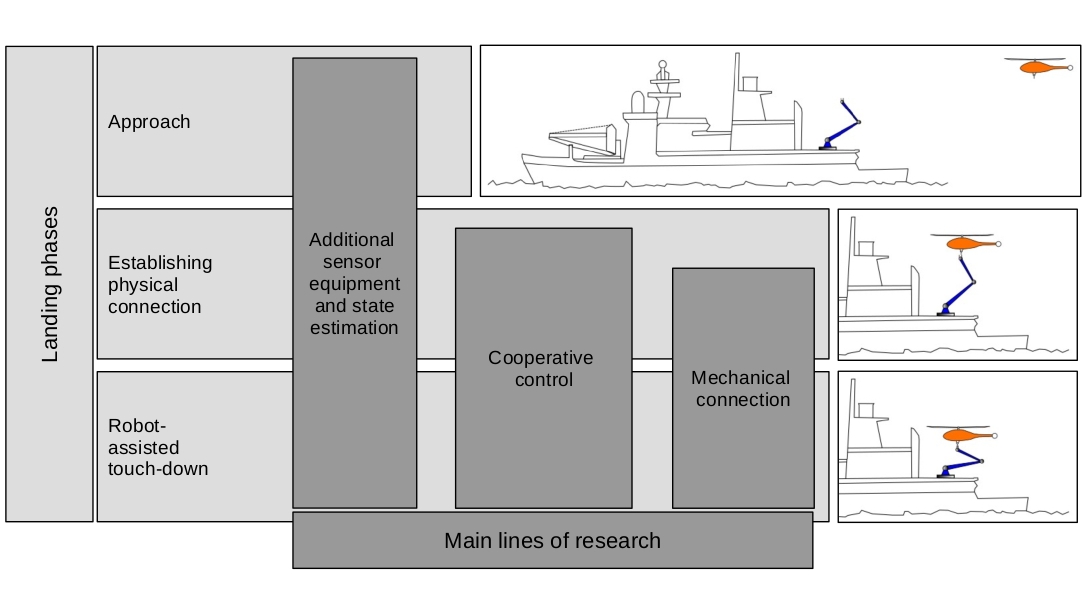
Ein neuartiger Ansatz beinhaltet den Einsatz eines robotischen Manipulatorarms, welcher auf der Landefläche montiert wird. Innerhalb seines Arbeitsraums ist dieser in der Lage die Bewegung des Untergrunds zu kompensieren, das Fluggerät automatisch einzufangen und so bei der Landung zu unterstützen. Der große Vorteil dieses Systems ist, dass das UAV seine Bewegung in der letzten Phase der Landung nicht an die Schiffsbewegung anpassen muss. Somit wird keine zusätzliche Leistung für die Landung benötigt. Zudem kann das robotische Landesystem auch zum Start der VTOL UAVs verwendet werden, wodurch sich das Landegestell einsparen und die Nutzlast erhöhen lässt.
Die Schwerpunkte der Forschung an diesem System sind die Integration zusätzlicher Sensoren und Algorithmen zur Zustandsbestimmung sowie die kooperative Regelung von Roboter und UAV.