
Abteilung Perzeption und Kognition

{kind=link}
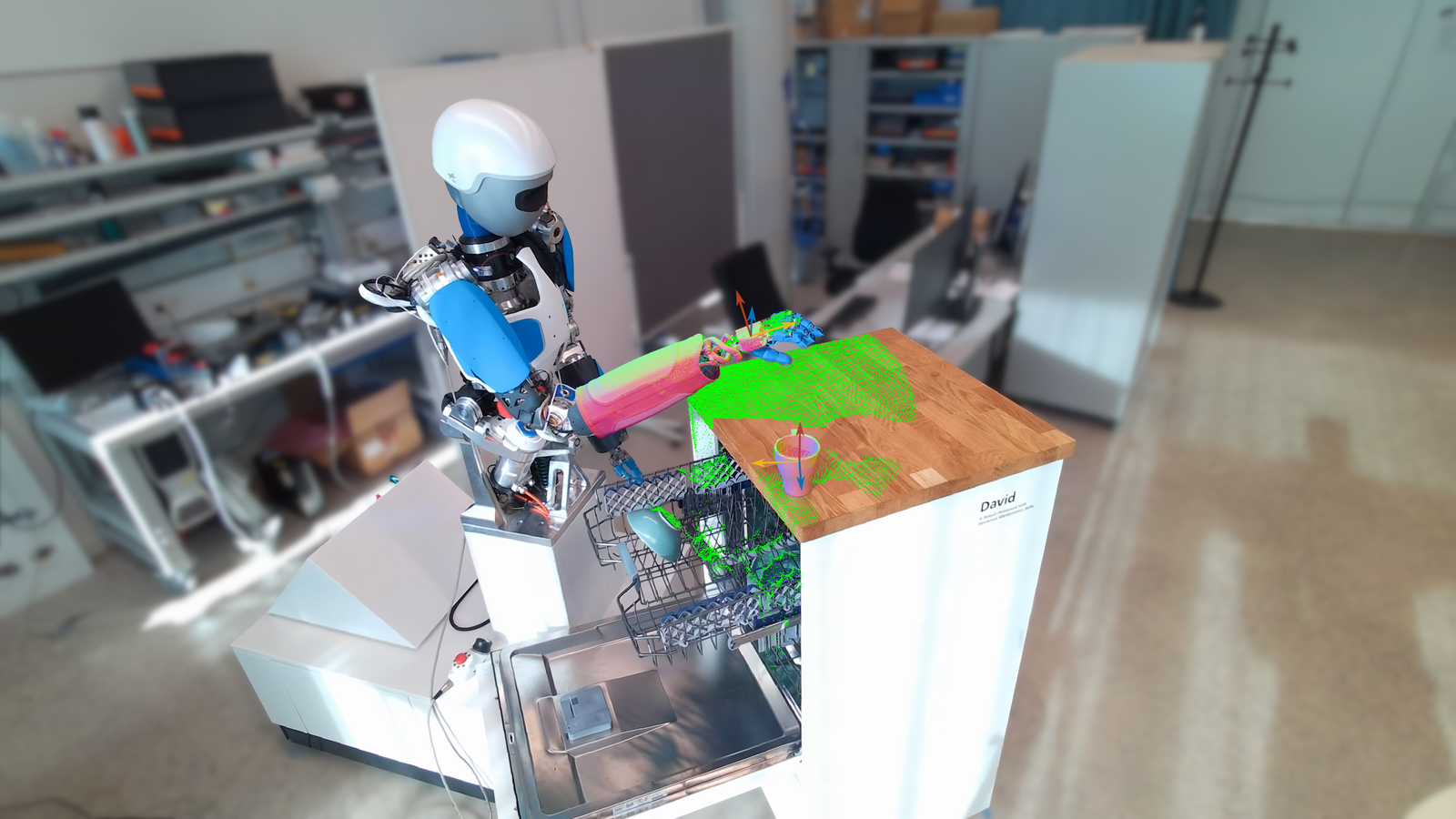
Die Abteilung Perzeption und Kognition beschäftigt sich damit, Robotersystemen eine ganzheitliche Wahrnehmung ihrer Umgebung mittels der zwei dominierenden Robotersinne Fühlen und Sehen zu ermöglichen. Perzeption und Kognition sind für teleoperierte Assistenz- und autonome Robotersysteme elementare Bestandteile, da sie reaktives Verhalten, Aufmerksamkeitssteuerung und Situationsinterpretation erst möglich machen.
- Sensordatenverarbeitung und -analyse in Echtzeit, z.B. Stereorekonstruktion, Objektverfolgung (Tracking) und 3D-Rekonstruktion
- Optische Navigation und Lokalisierung mobiler autonomer Systeme
- Verarbeitung und Analyse von EMG und Kraftdaten
- 3D-Umweltmodellierung mittels punkt-, volumen- und oberflächenbasierten Repräsentationen und daraus abgeleitete funktionale Modelle
- Erstellung von digitalen Geländemodellen und Fusion von 3D-Modellen unterschiedlicher Skalierung
- Datenfusion, -klassifikation und Lernalgorithmen
- Objekterkennung,Lageschätzung und Szeneninterpretation
- Echtzeit-3D-Visualisierung großer Datensätze, z.B. Terrainrendering, Augmentierung und Autostereoskopie
Die Entwicklung von integrierten Lösungen zur robotischen Wahrnehmung von der Datenakquisition bis zur Anwendung ist eine Kernkompetenz der Abteilung. Sensorbasierte Anwendungen wie taktile und visuelle Exploration und Navigation, Fotorealismus, aber auch die Augmentierung von realen Szenen für die Telerobotik sind ebenso Themen der Abteilung wie die Ableitung von Lösungen für die Automatisierung in der Industrie. Die Methoden der höheren Interpretationsebenen und ein aufgabenorientiertes Szenenverständnis bauen auf der Modellierung auf und ermöglichen effiziente Erkundungsprozesse für verschiedene Missionen im Weltraum, in der Luftfahrt und in terrestrischen Szenarien.
Die Abteilung ist in diesen Themenfeldern durch Kooperationen im nationalen und internationalen Bereich eng vernetzt. Es bestehen enge Industriekontakte, die den zunehmenden industriellen Bedarf an intelligenter Sensordatenprozessierung bedienen.