Haptic Rendering: Collision Detection and Response
Haptic Rendering: Collision Detection and Response
Realitätsnahe Bilder können heutzutage in interaktiven virtuellen Simulationen erzeugt werden. Der nächste Schritt hin zu einer noch realistischeren Erfahrung virtueller Umgebungen erfordert eine intuitive Objektmanipulation; dazu spielt die Kollisionsrückkopplung eine entscheidende Rolle.
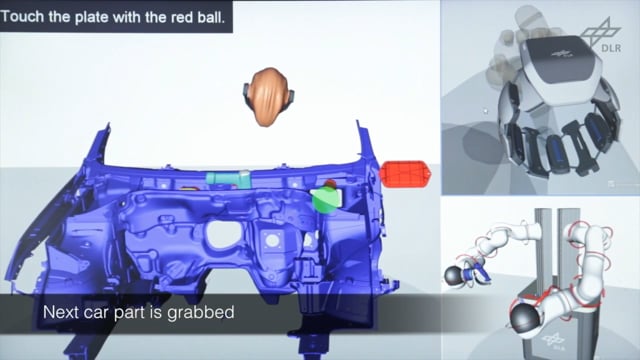
Die Gruppe für Telepräsenz und Virtuelle Realität des Deutschen Zentrums für Luft- und Raumfahrt forscht an haptischen Algorithmen, die solche virtuelle Szenarien mit Kollisionsrückkopplung ermöglichen. Der Benutzer kann komplexe virtuelle Objekte in Echtzeit dank unseres haptischen Eingabegerätes HUG manipulieren; Immer wenn virtuelle Objekte miteinander kollidieren, spürt der Benutzer die entsprechenden Kollisionskräfte. Folgendes Video zeigt eine solche haptische Rückkopplung am Beispiel einer Einbaumontagesimulation:
Dieses Video ist eine Erweiterung des gleichnamigen Beitrags, der auf dem ACM Symposium on Virtual Reality Software and Technology (VRST) 2016 präsentiert wurde. Wir stellen eine Virtual-Reality-Plattform vor, die einige der aktuell herausfordernden Forschungsthemen im Bereich der virtuellen Montage adressiert und integriert: realistische und praktische Szenarien mit mehreren komplexen Geometrien, bimanuelle haptische Sechs-DoF-Interaktion für Hände und Arme und intuitive Navigation in großen Arbeitsräumen. Besonderes Augenmerk legen wir auf unser Framework zur Kollisionsberechnung, das mit einer Kombination aus penalty- und constraint-basierten haptischen Rendering-Methoden steife und stabile Kräfte in 1 kHz darstellen kann. Die Interaktion mit mehreren beliebigen Geometrien wird in Echtzeitsimulationen unterstützt, ebenso wie verschiedene Schnittstellen, die kollaborative Trainingserfahrungen ermöglichen. Es werden Leistungsergebnisse für eine beispielhafte Automontagesequenz vorgelegt, die die Einsatzfähigkeit des Systems zeigen.
A Platform for Bimanual Virtual Assembly Training with Haptic Feedback in Large Multi-Object Environments
Für die Wiedergabe dieses Videos auf Vimeo.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
A Platform for Bimanual Virtual Assembly Training with Haptic Feedback in Large Multi-Object Environments
Dieses Video ist eine Erweiterung des gleichnamigen Beitrags, der auf dem ACM Symposium on Virtual Reality Software and Technology (VRST) 2016 präsentiert wurde. Wir stellen eine Virtual-Reality-Plattform vor, die einige der aktuell herausfordernden Forschungsthemen im Bereich der virtuellen Montage adressiert und integriert: realistische und praktische Szenarien mit mehreren komplexen Geometrien, bimanuelle haptische Sechs-DoF-Interaktion für Hände und Arme und intuitive Navigation in großen Arbeitsräumen. Besonderes Augenmerk legen wir auf unser Framework zur Kollisionsberechnung, das mit einer Kombination aus penalty- und constraint-basierten haptischen Rendering-Methoden steife und stabile Kräfte in 1 kHz darstellen kann. Die Interaktion mit mehreren beliebigen Geometrien wird in Echtzeitsimulationen unterstützt, ebenso wie verschiedene Schnittstellen, die kollaborative Trainingserfahrungen ermöglichen. Es werden Leistungsergebnisse für eine beispielhafte Automontagesequenz vorgelegt, die die Einsatzfähigkeit des Systems zeigen.
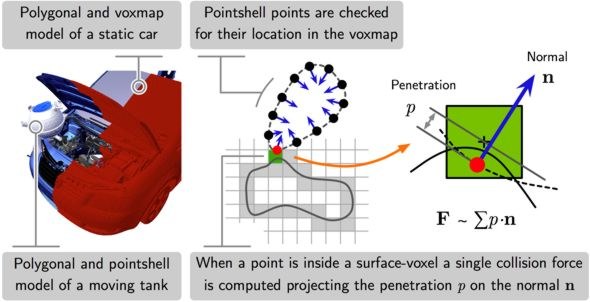
Im Vergleich zum graphischen Rendern, das für eine stabile und flüssige Darstellung einen 30 Hz-Takt benötigt, müssen haptische Signale in einer herausfordernden Frequenz von 1000 Hz erzeugt werden, um eine realistische und stabile Rückkopplung zu schaffen. Dafür wird ein Algorithmus entwickelt, der zwei Datenstrukturen verwendet: voxelisierte Abstandsfelder (Voxmaps) und Punkt-Kugel Hierarchien (Pointshells). Unsere Forschung basiert auf dem Voxmap-Poinsthell (VPS) Algorithmus, der echtzeitige Kollisionsrückkopplung auch mit Millionen von Dreiecken ermöglicht.
Haptic Rendering: Collision Detection and Response