


Telemanipulation
Telemanipulation des Humanoiden Roboters SpaceJustin Telemanipulation mobiler Roboter Telemanipulation unter variierender Zeitverzögerung und Paketverlust Multilaterale Regelung
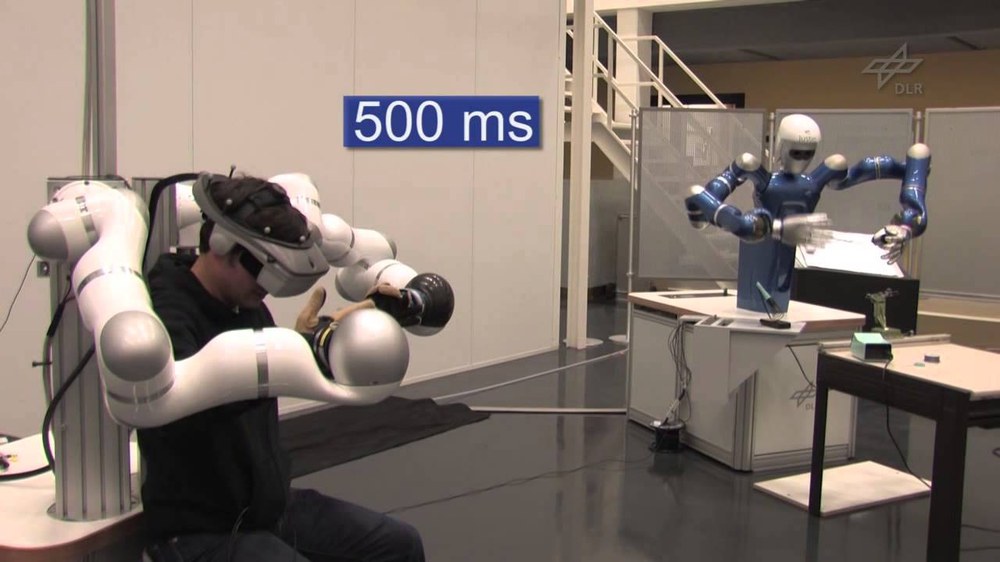
The Telepresence and Virtual Reality Lab - Robotics and Mechatronics Center, DLR




