
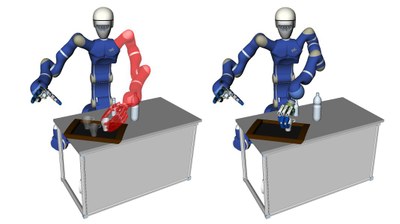
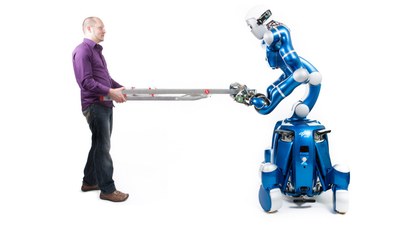
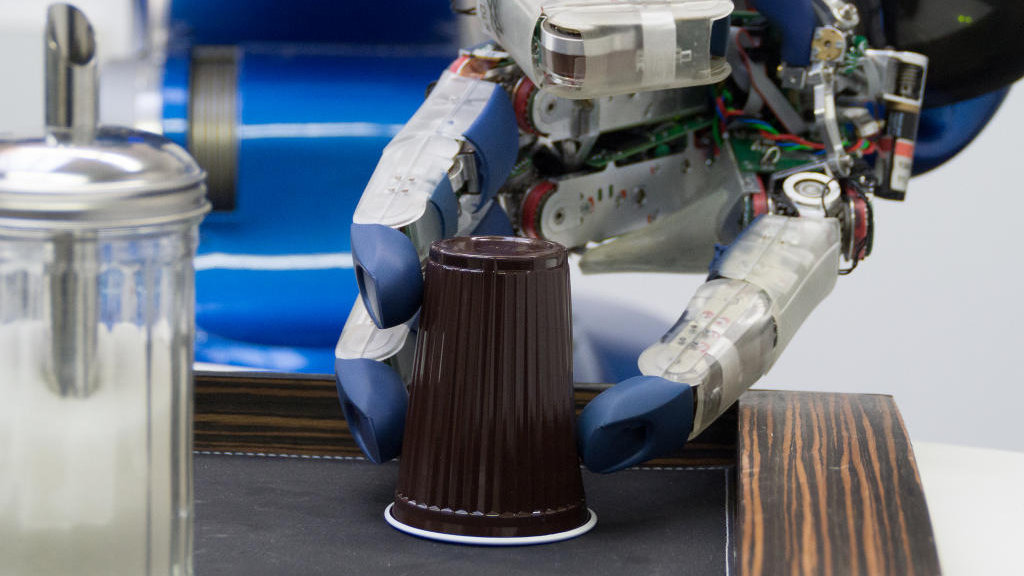
Rollin' Justin


Der humanoide Roboter Rollin Justin
Credit:
Size: | Adult human (1.91 m) |
Weight: | approx. 200 kg |
Degrees of freedom: | 51 (platform: 8, arms: 2 × 7, hands: 2 × 12, neck: 2, torso: 3) |
Nominal load capacity: | 20 kg |
Energy supply: | Battery with operating time of > 60 min |
Speed: | 2 m/s or 7.2 km/h |
Working space: | From the floor to a height of 2.7 m |
Special features: |
|






{kind=link}
{kind=link}
{kind=link}