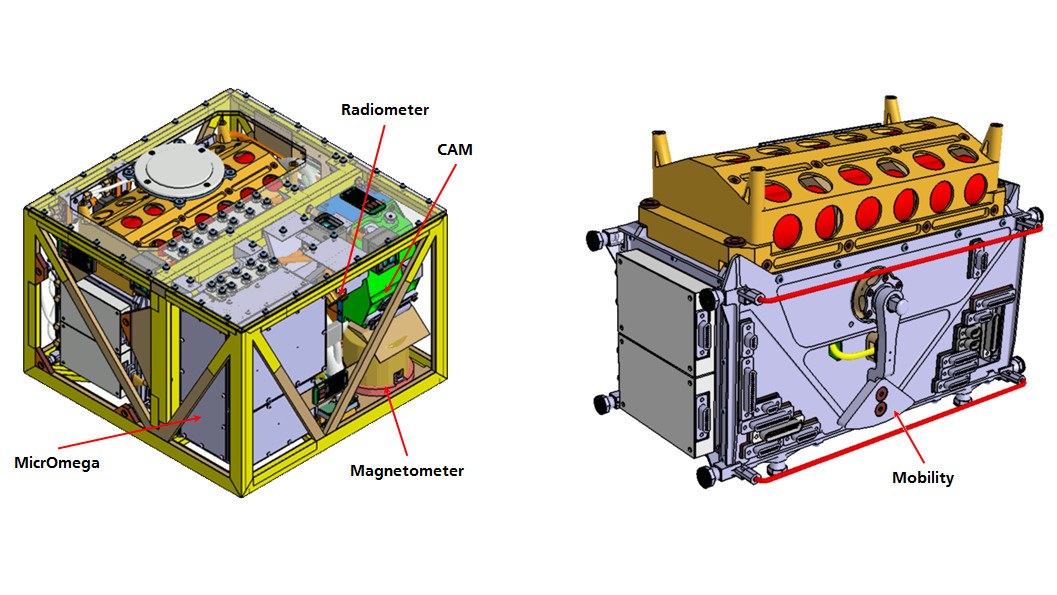
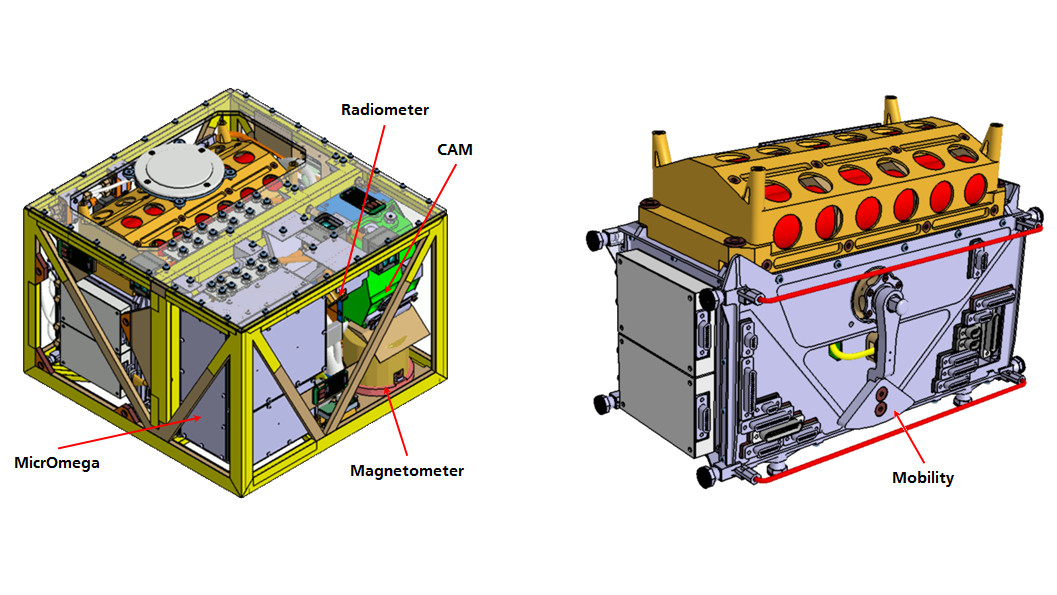
DLR has developed an asteroid landing unit MASCOT (mobile asteroid surface scout) as a contribution to the Japanese Hayabusa II mission. The individual components of MASCOT as well as the classification within the Hayabusa-2 mission are described by the Institute of Space Systems.
The Institute of Robotics and Mechatronics contributed a locomotion mechanism to MASCOT by means of a swing arm. The target asteroid 1999JU3 or Ryugu has a very low gravity, so that any movement on its surface has to be dosed skillfully. MASCOT can move in a bouncing and uprighting manner by rotating an eccentrically mounted mass (the swing arm). The eccentric mass is specifically accelerated and decelerated. In this way, torques are applied to the almost 10 kg payload box. This achieves both a turning and a locomotion.
The power electronics of the BLDC motor was designed redundantly and is compactly accommodated on a board measuring 95 × 105 mm. Careful selection of the electrical and mechanical components ensures that the motor functions under adverse conditions.
The mission was launched on December 3, 2014 at 13:22:04 (JST) from Tanegashima Space Center. In the summer of 2018, the Hayabusa2 probe approached the asteroid to within a few kilometers and took its first images. The lander MASCOT was successfully released by the Japanese spacecraft on October 3, 2018 at 01:58 UTC from a height of 51 meters and came to rest on the asteroid's surface about 20 minutes later. After a few bounces, the unit was able to start its work and complete it to the complete satisfaction of all scientists involved, see also the article on the DLR main portal.
More information on the project can be found at the project page.
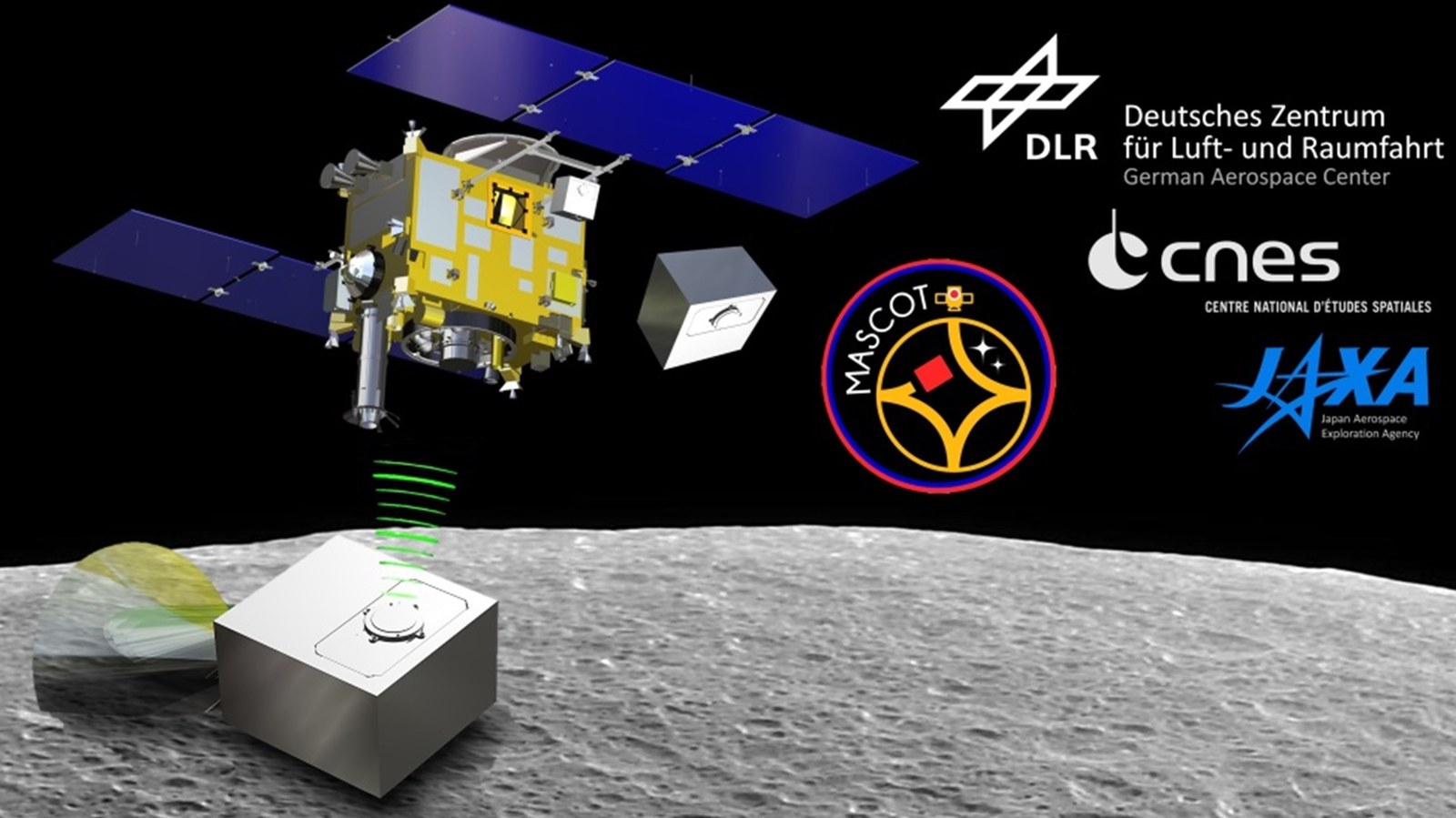
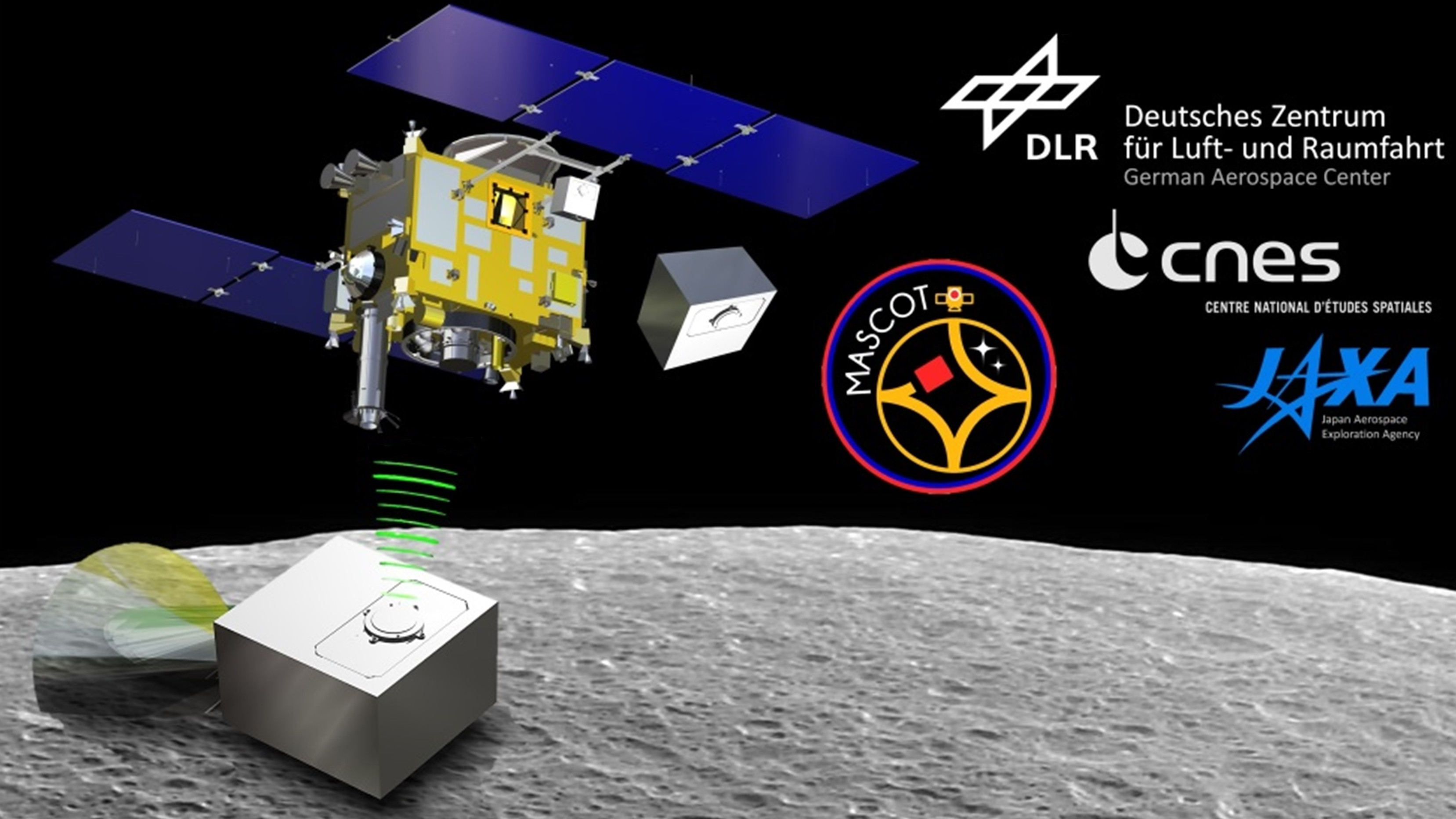
MASCOT scenario
Depiction of Hayabusa2 and MASCOT in mission scenario at asteroid



{kind=link}
{kind=link}