The light-weight robot SARA demonstrates novel functionalities in force controlled robotics for a smooth human-robot collaboration. Industry 4.0 applications thereby become more efficient, cheaper and safer. SARA was introduced to the public at the Automatica 2018.
Technical data
Size:
Length 1250 mm for stretched robot arm
Weight:
22.6 kg
Degrees of freedom:
7 (roll-pitch-roll-pitch-roll-pitch-roll)
Nominal payload:
12 kg
Force resolution:
Better than 0.1 N
Axis speed:
Up to 400 °/s
Sensors:
• Torque sensors in each joint • Force-Torque-sensor at the base and the wrist • 2 IMUs
Communication:
• Links and Nodes Middleware • Ethernet via PCIe
Workspace:
Spherical hull with r=297 mm, R=1024 mm (wrist)
Features:
• Recuperation via a capacitor bank • Sensor-Port (PCIe) for optical sensors • Limitation of collision torques • Option for force-teaching in contact
System description
The recent generation of DLR’s light-weight robots bears the project name SARA – Safe Autonomous Robotic Assistant. This robot generation unites modern electronics and mechanics with innovative control approaches. Its goal is the functional enhancement of the output device robot to an interconnected sensor-actuator system in the factory of the future, which will be strongly characterized by digital supervision and control procedures.
More efficiency due to SARA
SARA is a torque controlled robot arm with seven axes and 12 kg payload. Its good foldability and short wrist axis allows an excellent usage of its large workspace and a good reachability from different sides – even for large workpieces. The precise torque sensors and the actuators optimized for high dynamics open up a wide range of applications and permit swift manipulations.
Force sensor-kinematics: force, control and sense
A particular scientific novelty is the redundant force sensor-kinematics. On one hand they enable a high-resolution force and torque measurement at the robot flange. On the other hand, they allow measuring the contact forces during the manually guided teaching of the robot.
Programming by demonstration²
While current robots can only learn positions from manually guided movements, SARA can record position and force trajectories simultaneously. This accelerates programming by demonstration by a multiple and permits a more intuitive programming than subsequent, numeric input of force directions and values. The operator demonstrates the robot not only what to do but also how to do it.
Another new feature is the high frequency supervision of force curves during assembly operations, enabled by a combination of sensor kinematics and high bandwidth. As a result, assembly errors can be detected in the future already during the assembly procedure. Experiments with the new sensor kinematics have demonstrated a significantly earlier, independent of direction and more selective detection of contacts and collisions at the end effector. This allows not only more dynamic assembly procedures but also increases the safety in human robot cooperation.
The increased control frequency and minimal latency as well as the optimization of actuators and structure parts for high dynamics lead the force control to maximum efforts. The cartesian stiffness in random directions, for example, can be set to any value between 0 and 20 000 N/m, which is almost adequate to the stiffness of classical position control.
This simplifies the handling of unstable contacts, which occur e.g. when guiding a convex tool along a convex edge.
Features of the SARA technology
An infinitely rotatable seventh axis with energy and communication transmission and an integrated quick-change mechanism with tool recognition, energy and data interface allow the autonomous reconfiguration within complex task sequences.
An operator input with buttons and a display at the robot arm permits intuitive on-site inputs instead of programming at the PC.
Hidden within the robot’s structure, two quadruple joint control blocks work with a system clock of 8 kHz. The joint controllers are connected via PCI Express to the control computer, which performs the whole-arm control at the same clock rate. This architecture enables the supervision of all internal values in real time and the subsequent integration of additional components via mPCIe-slots.
An integrated capacitor bank allows the recuperation of energy during braking (KERS), and a mechanic overload protection prevents damages to the robot from undesired hard collisions.
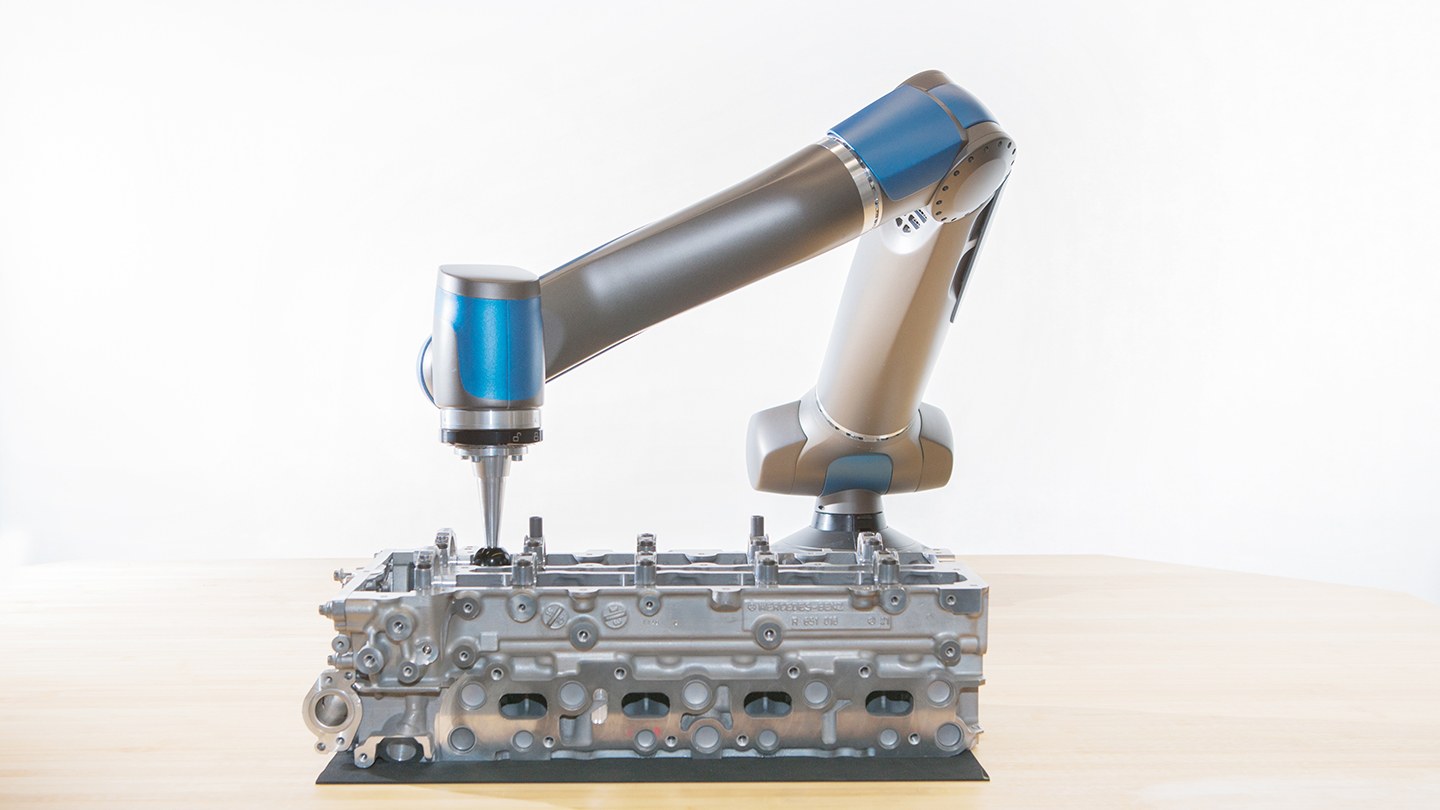
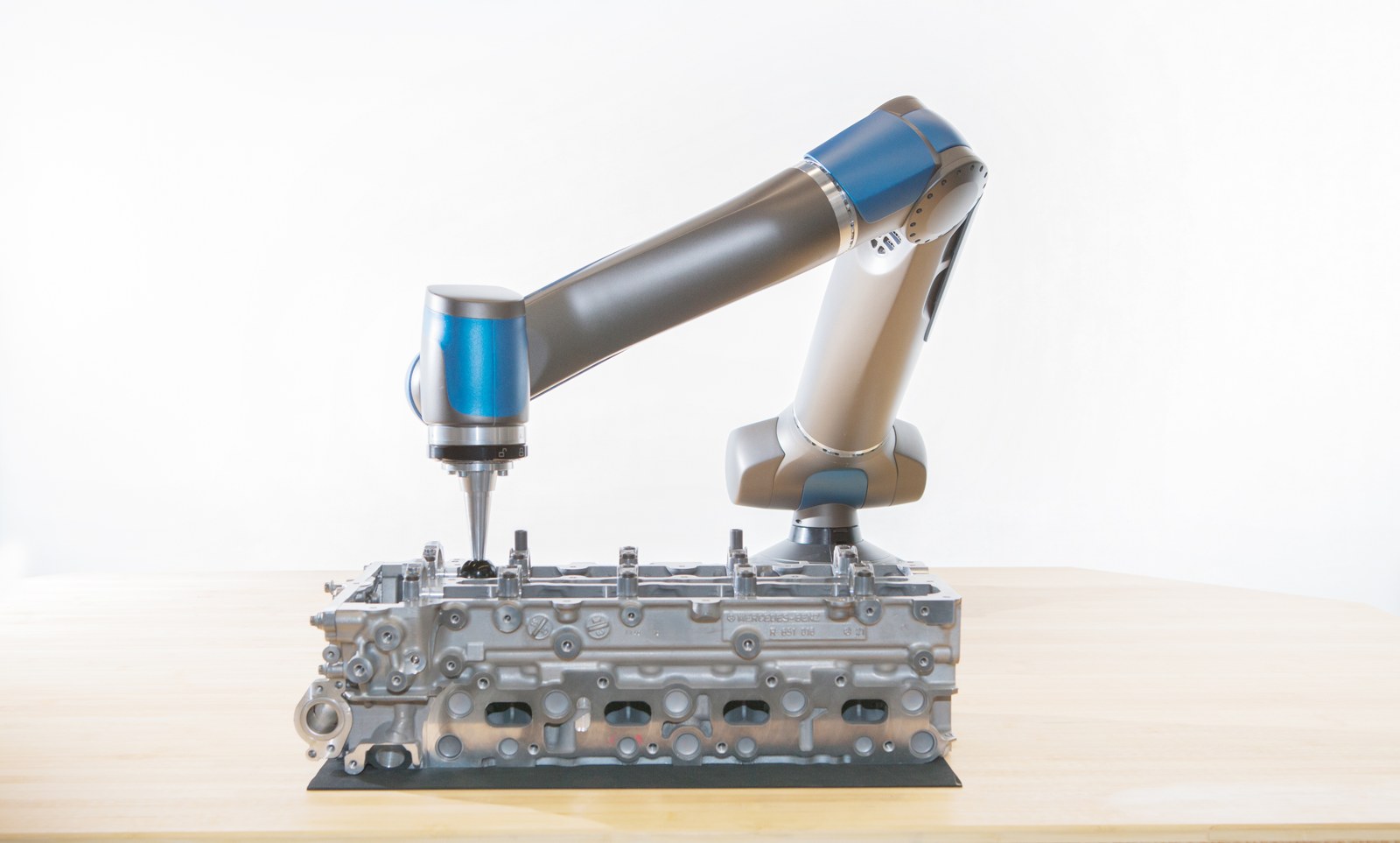
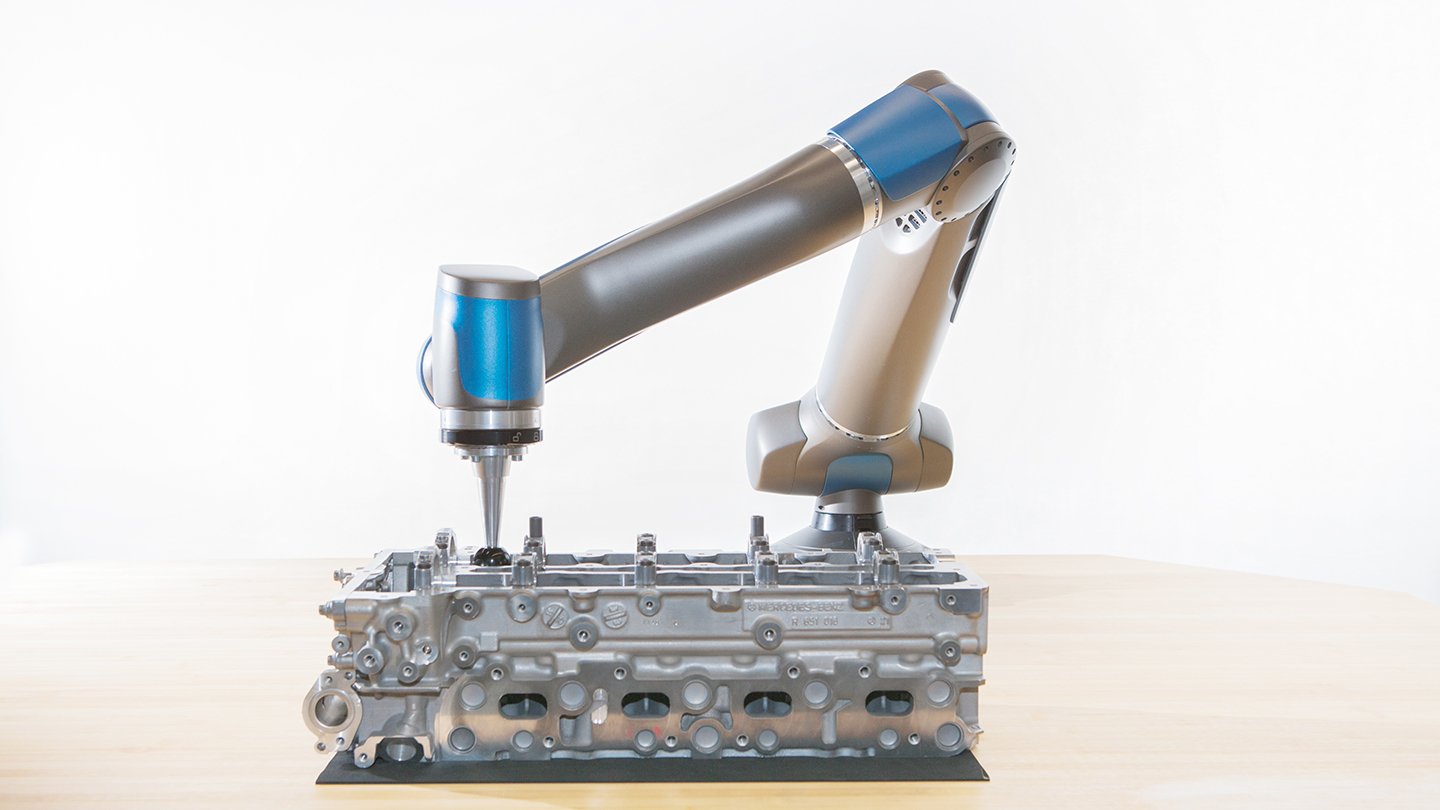
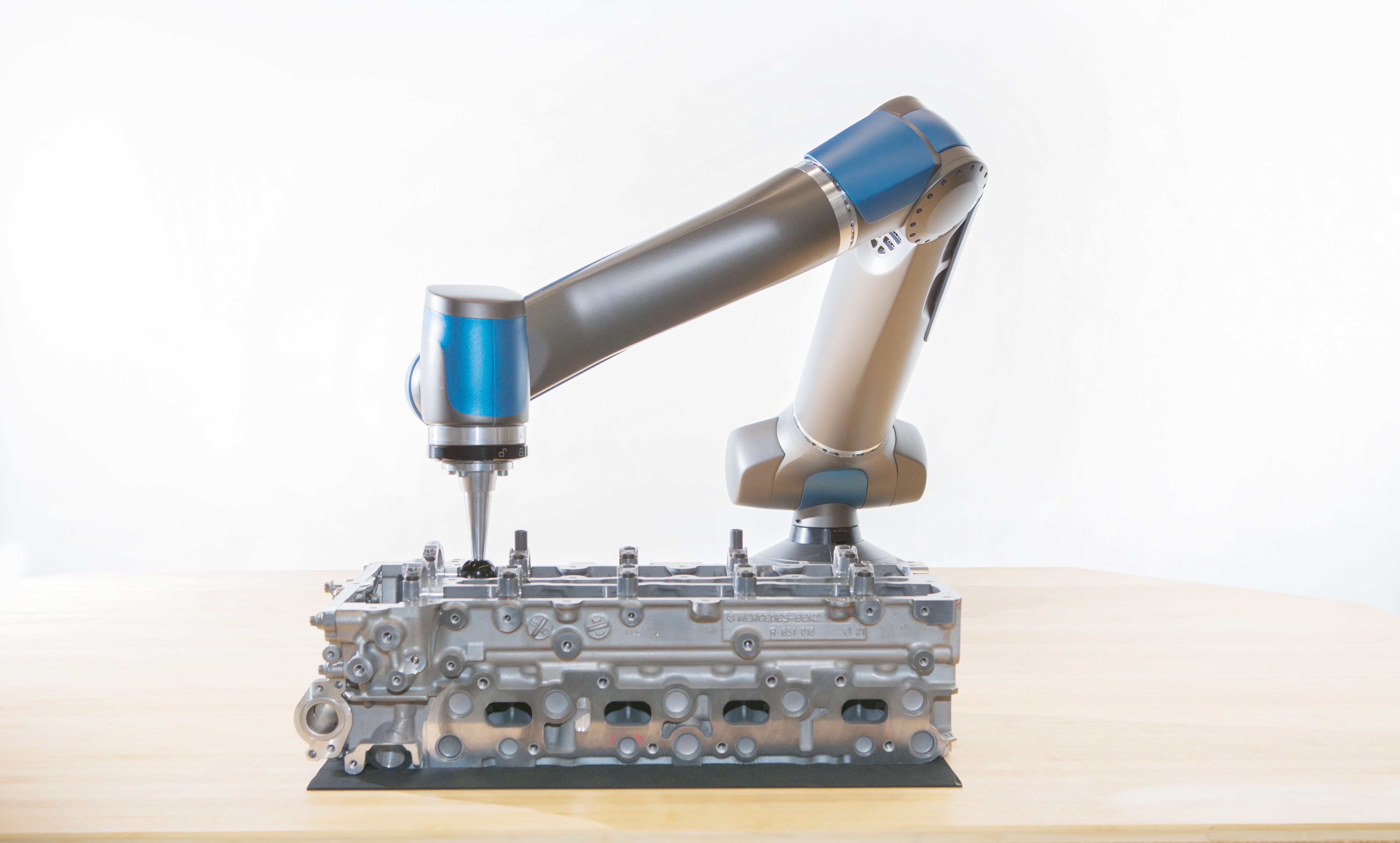
Robot arm SARA with engine mount
Safe Autonomous Robotic Assistent (SARA) with engine mount
Iskandar et al., "Collision Detection, Identification, and Localization on the DLR SARA Robot with Sensing Redundancy", in Proc. of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi' an, China, May/June 2021.
Iskandar et al., "Joint-Level Control of the DLR Lightweight Robot SARA", in Proc. of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, USA, pp. 8903-8910, October 2020.


{kind=link}
{kind=link}