
Design methods of the LWR III
Concurrent Engineering
As the Light Weight Robot (LWR) is a highly integrated system of mechanical and electronic components collaboration between electronic and mechanical design from the start is essential.


At project start the basic design of integrating the controllers and power converters in the joints was determined as well as communication and supply concepts and power distribution. In the design process of the joints and links permanent interaction between mechanical and electrical design was necessary to achieve a high integration level. This close interaction can only be performed using interchange modules between the different design applications as CAD and PCB layout software in several iteration loops.
Finite Element Analysis
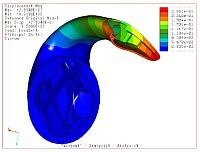
Designing a Light Weight Robot demands explicit knowledge of the stiffness of the structure inherited. As a light construction is always elastic, the thinning of the structure may only be performed to a grade of stiffness that is least required for good controllability. The Finite Element Analysis was used to examine all the critical components of the structure as well as to layout the torque sensors for maximum linearity and minimum influence of transverse forces.