
Impressions from ILA 2014
The Institute of Robotics and Mechatronics presented at ILA Berlin Air Show from 20.05.2014 until 25.05.2014 three exhibits at the DLR booth (booth No. 4301) and the Space Pavillon (booth No. 4000) in hall B4.


{kind=link}
At the Space Pavillon along with the exhibition of TORO, the Lightweight Rover LRU was also on display:
On Wednesday, an already existing memorandum of understanding in the field of space robotics has been renewed for another three years.
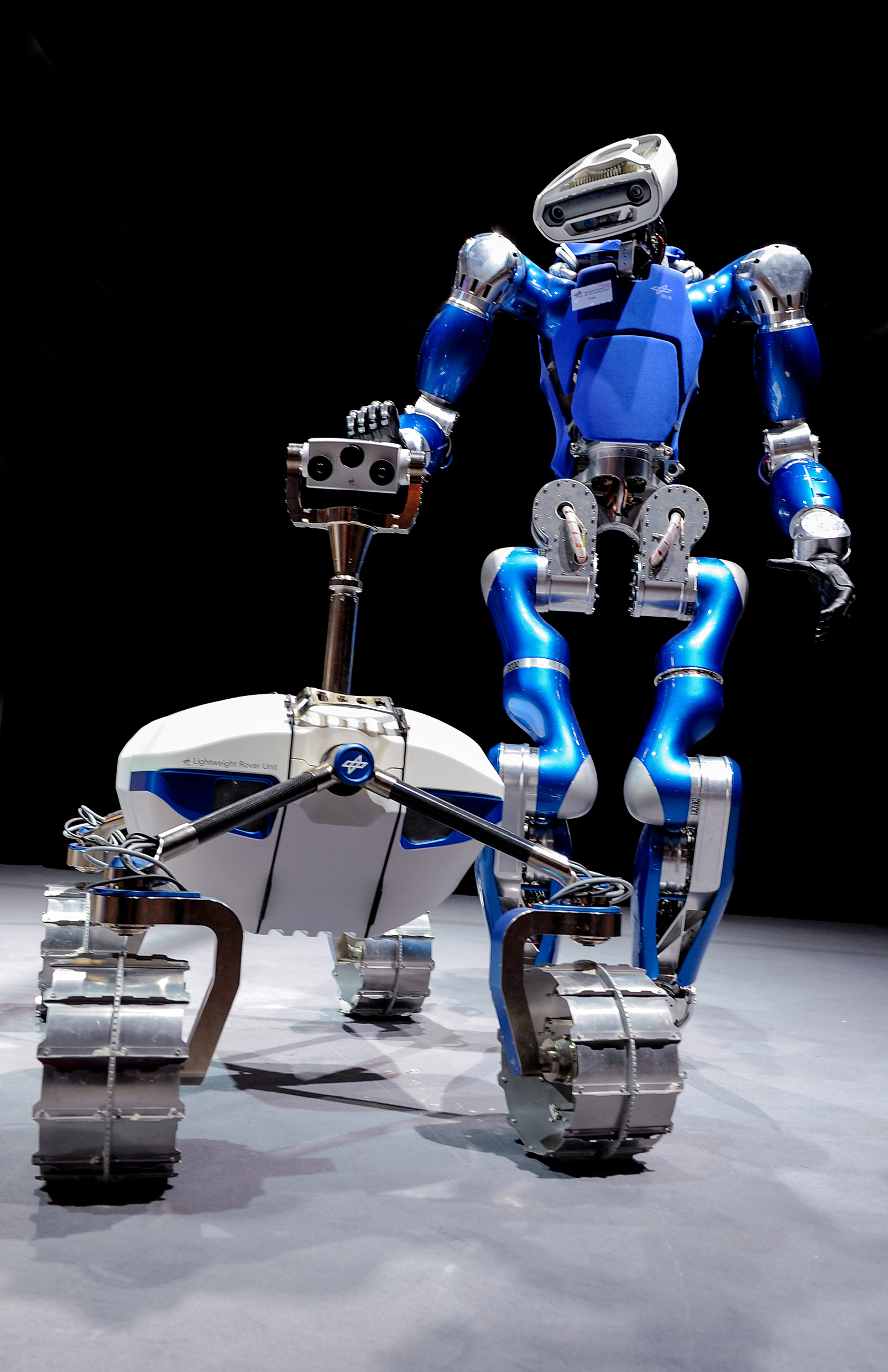
TORO at Space Pavillon

Due to the small support area and the possibility to step over obstacles, legged robots represent an interesting alternative to wheel based systems in many applications. The bipedal humanoid robot TORO (TOrque controlled humanoid RObot) has been developed based on the drive technology of the DLR lightweight arm and provides torque sensing in all joints of the arms and legs. These compliant control approaches enable TORO as opposed to classical position based methods to react sensible to environment forces. In addition to research on bipedal balancing and gait stabilization scientists are also interested in physical interaction using multiple contact points at the arms and legs.
Lightweight Rover Unit (LRU) at Space Pavillon

{kind=link}
This first semi-autonomous DLR rover is a prototype for robotic exploration of the Moon or Mars. It combines a number of the latest technologies developed at the Institute of Robotics and Mechatronics, such as drive and steering units with motors that have demonstrated their suitability for space in DLR’s ROKVISS experiment, which was on the ISS for five years. A stereo camera and the multiple-award-winning Semi-Global Matching (SGM) technique for determining depth images give the robot the ability to perceive its environment in 3D. Based on this data, the rover is able to generate ‘local maps’ and steer autonomously in unknown and uneven terrain to predefined targets. This autonomous navigation is required as signals from Earth are delayed for many seconds or minutes before reaching the robots, making remote control difficult to impossible.
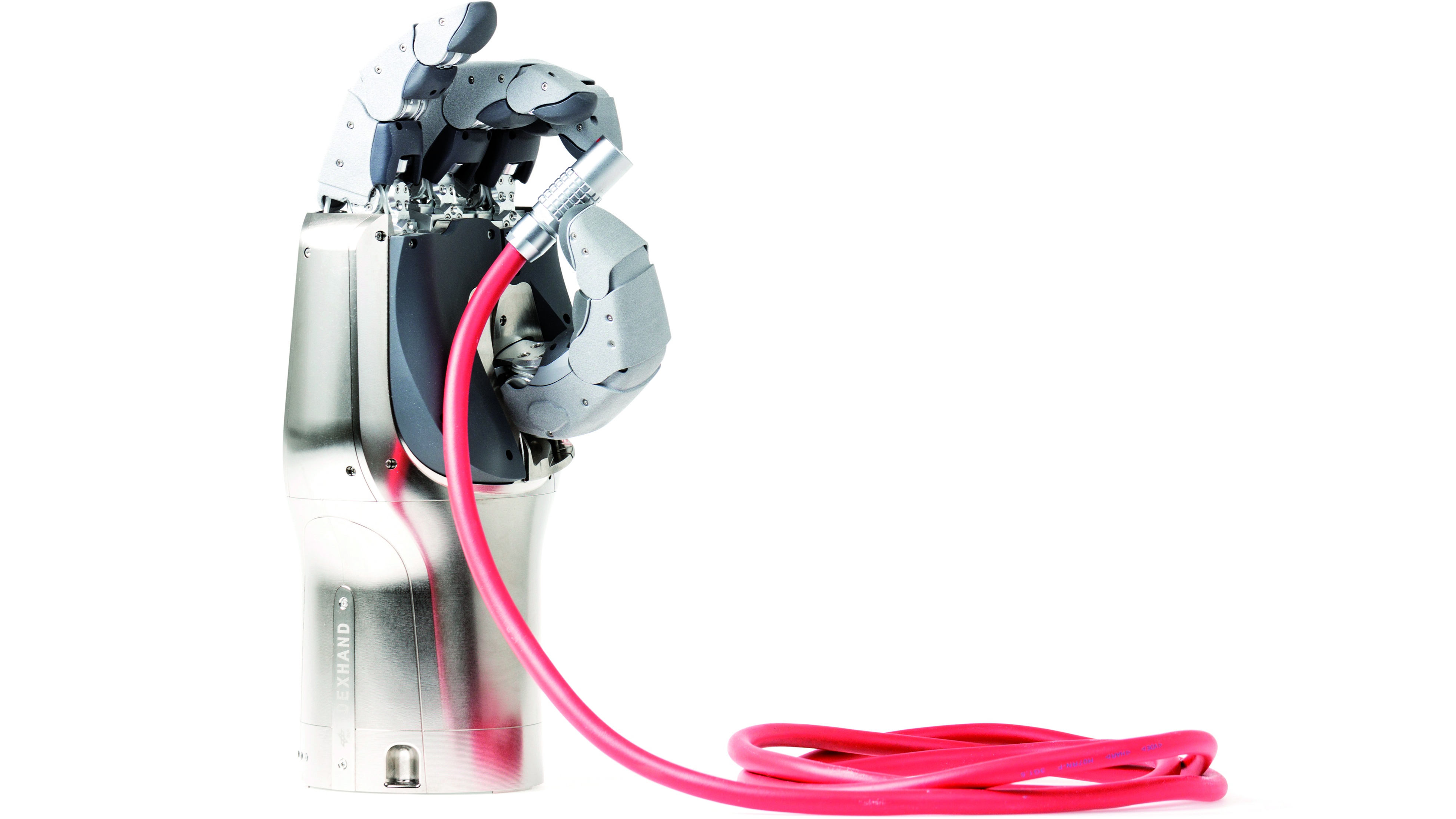
DEXHAND at DLR Booth
{kind=link}
As compact as possible and at the same time lightweight and sensitive – the requirements for robot hands for use in space are challenging. They must be able to withstand harsh conditions such as vacuum, ionising radiation and shock loads. If, in the future, a ground-controlled robotic system should perform tasks on the International Space Station, the robot hands must be human-like – so they can use existing tools and equipment developed for a human hand. The DLR DEXHAND is therefore the size of the gloves worn by the astronauts during spacewalks. For the ease of the operator using the robot hand by telemanipulation – remote operation, there is an especially important requirement – the hand must be intuitive to command in order to achieve a short training time.