
Controlling Light-Weight Robotics
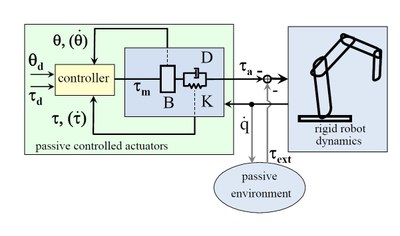
Our light-weight robots are controlled by a cascaded structure of current, joint and Cartesian level controllers. The modular joints are equipped with motor-side position sensors (based on magneto-resisitve encoders) and link-side torque sensors (based on strain gauges). Additional link-side position sensors (potentiometers) are available for safety checks and referencing. The collocated design of the joint with actuator and sensor in close proximity is advantageous from a control point of view and enables robust, passivity-based control approaches.
The fastest and most inner loop is the space-vector modulated PI current control of the RoboDrive BLDC motors. It runs at 20kHz on a local fixed point motion control DSP in every joint and ensures high bandwidth for the upper control layers.
The middle layer of the control structure is the joint control. It runs at 3kHz on a local floating point DSP in every joint. The joint controller is a state feedback controller that uses the motor position and the link-side torque and their derivatives as state. The feedback of the torque signal allows for active vibration damping of the flexible robot joints. Additionally, friction and other disturbances like HarmonicDrive and motor ripple can be observed and compensated online. Depending on the application, the higher level controller can adapt the feedback gains and tune the behavior of the joint seamlessly from compliant torque control to stiff high-performance position control.
{kind=link}
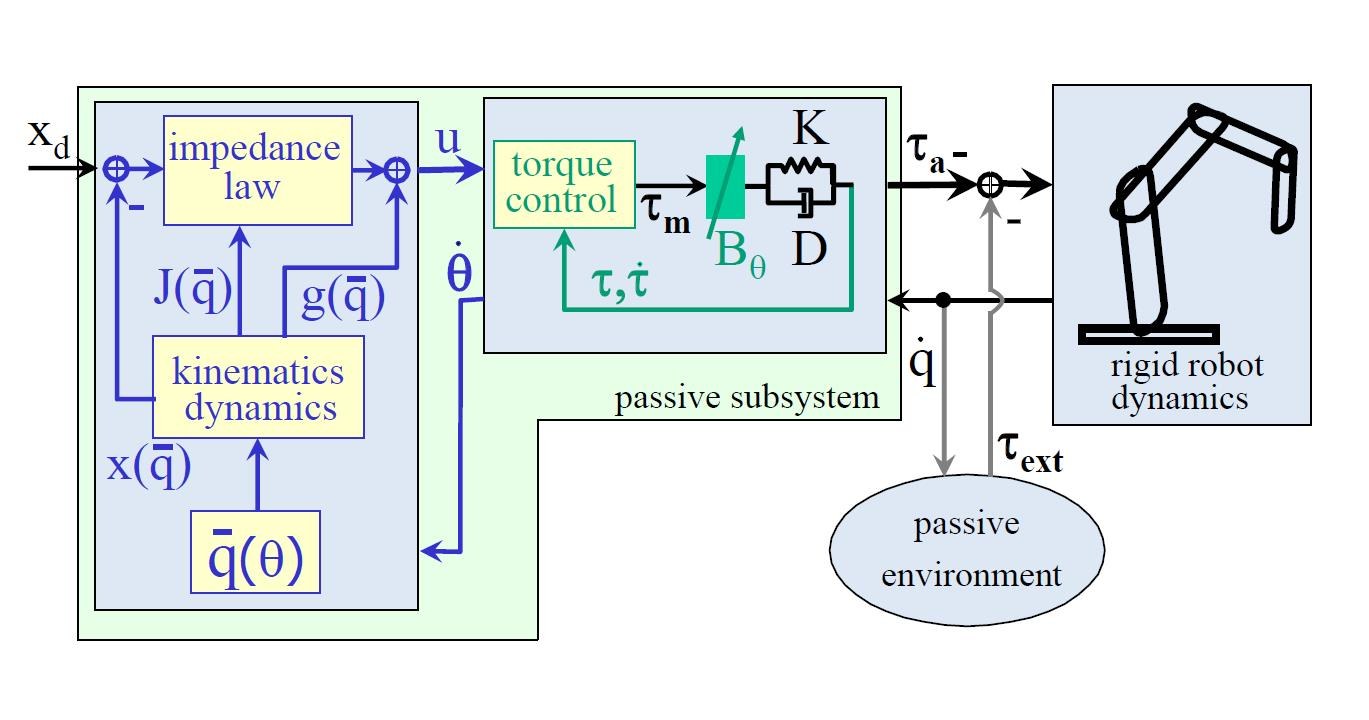
The high level control of the complete robot system is done on an external control computer, running at 1kHz. Due to the light-weight design and the elasticity in the HarmonicDrive gearboxes and the torque sensors, a flexible joint robot model is considered for the controller design. The high level control calculates the dynamic model of the robot to provide proper feed-forward terms for the joint control. Depending on the desired behavior it also adapts the gains of the joint control loop for optimal performance in position control or implements a compliant control law like Cartesian impedance control.

The following controllers are typically used for applications:
- Gravity compensation - pure torque control on joint level with compensation of the gravity terms. This mode makes the robot completely compliant and thus allows users to intuitively position the robot freely in the workspace, for example to teach positions interactively.
- Position control - a full state-feedback position controller for high performance movements in free space, for example for industrial pick-and-place transfer motions. The feedback includes an integral term for high accuracy and the torque feedback actively dampens the vibrations of the structure. Feedback gains are adapted online according to current load and robot configuration.
- Cartesian impedance control - a Cartesian controller that mimics the behavior of a mechanical multidimensional spring-damper-mass system with user-defined stiffness and damping. In contrast to normal admittance controlled industrial robots, the robust passivity-based implementation allows a high range of desired stiffness settings down to zero and a stable execution even under rigid contacts and contact transitions. This mode is especially useful for all movements in contact with the environment, for applying forces to workpieces or for aligning parts in industrial assembly applications.
The precise knowledge of the dynamic model and the availability of torque measurements in the joints allow a detection of all interaction forces with the environment and therefore a sensitive collision detection. As the control mode can be changed from one control cycle to the next (within 1ms), an immediate reaction to collisions with the environment is possible. This way, the light-weight robot can bring together the advantages of high-performance position control in industrial settings and sensitive compliant behavior in assembly scenarios and physical human-robot interaction.
Publications
[1] A. Albu-Schäffer, C. Ott and G. Hirzinger, “A unified passivity based control framework for position, torque and impedance control of flexible joint robots”, International Journal of Robotics Research, vol. 26, no. 1, pp. 23-39, 2007
[2] A. Albu-Schäffer, S. Haddadin, C. Ott, A. Stemmer, T. Wimböck and G. Hirzinger, “The DLR lightweight robot, design and control concepts for robots in human environments”, Industrial Robot – an international journal, vol. 34, no. 5, pp. 376-385, 2007