
Presentations / Scenarios

{kind=link}



World Space Congress, Houston 2002
Arm and Hand were mounted on a linear axis system in the lab. The scene-analysis component could recognize water and wine bottles and two different types of glasses. The robotic system was mounted in the lab, whereas it was commanded from a VR system built by IRF, Dortmund located in Houston on the WSC. The telecommand as well as the telemetry data were sent over the Internet. Additionally and a high quality video signal, to show the robotic system in the lab, was sent over ISDN to Houston.
For private demonstrations a simple command interface with a RealVideo Stream to visualize system status was also provided using only Internet connection.
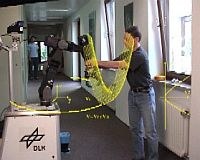
Automatica 2004
The system was integrated on the mobile platform. Basic navigation skills and a simple obstacle avoidance method were added to navigate autonomously to the desk. A speech interface was added and attached to a commercial speech command system. That allowed it to command the robot very intuitive from all over the booth. The scene-analysis component worked without additional special lightning. The precision of the object localization allowed to unscrew the cap of the water bottle (see figure).
A demonstration for wiping with a sponge was given. Shown a basic wiping pattern by moving the arm with the sponge, the system could generate a wiping trajectory for an area with some spilled wine. The wiping area was detected by vision.
ICRA05 Video Proceedings (Finalist for the ICRA 2005 video award)
A new complex skill was added that allows the system to open and drive through a door. First the platform moves in front of the door with help of odometry and laser scanner localization. Then the vision system detects the door handle with a template matching approach. The matches from the three video images of the digiclops system deliver sufficient precise door handle localizations to securely approach and grasp the handle. After reaching contact with the hand the arm is put into a Cartesian impedance controlled mode based on a special potential function. During the move through the door hinge the arm has its virtual equilibrium position on a circular path relative to the base platform. There is not rotational stiffness set that means the orientation of the hand automatically adjusts. This approach allows opening the door without exact information about the doors size.