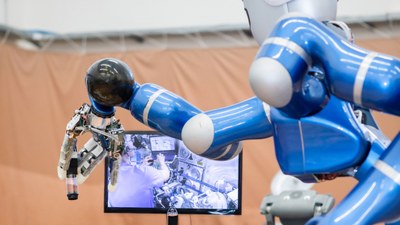
Terrestrial Assistance
Universal service robots are envisaged to revolutionize the way we live, from public services, over healthcare applications, to personal assistance. The robots required therefore have to be versatile, intelligent, and dexterous.