
Biomechanics
We want to design robotic systems that offer specific desirable abilities, like flexibility and fast adaptability, like the human. In order to do that, we first need to identify the underlying structure and mechanisms. The goal is not to exactly copy nature's example. We want to see how nature implemented functionality and, if possible, why in that way. To acquire the necessary information we conduct studies with humans. The data we collect are thoroughly analyzed and evaluated. Using this knowledge, the question is how to design systems that mimic the behavior rather than the architecture.


Aiming at improving the design of anthropomorphic hands that shall be able to grasp a wide variety of objects—including those that were designed to be used by the human hand—we are looking for a model of the human hand that describes how it can move. For this, we use magnetic resonance imaging (MRI) and optical surface marker tracking to precisely measure human hand postures. We approximate the human joints with serial chains of rotational axes and use optimisation methods to fit the postitions and orientations of the axes to the measured hand postures.
In optical surface marker tracking, the movement of the skin over the bones needs to be modelled, otherwise it will introduce a measurement error called soft-tissue artefact (STA). The amount of skin movement over the bones is particularly large near joints, as we confirmed using MRI measurements with skin markers [1]. However, a simple model can explain most of that movement [1]. In MRI, since the bones are visible, a skeletal movement model can be directly fitted to the measured bone poses. However, the challenge is to correctly determine the bone poses, a problem called bone registration. The errors of bone registration can be in the same order of magnitude as the STA [2].
We use kinematic hand models to accurately track finger joint angles during grasps of objects. We study postural synergies, i.e., correlations between the joint angles, as a method to reduce the complexity of the human hand [3].
Defining the Cartesian stiffness matrix of variable-impedance robots is quite a heuristic task, be they passively or actively compliant. Furthermore, depending on the desired task, the stiffness behavior must be adapted during movement. Humans learn to control limb stiffness from interaction, and exhibit fine variation of impedance depending on the task and environment. We want to understand the mechanisms for setting and varying impedance in the human arm and hand, and transfer such models to the robotic domain. Our main goals are:
- to understand according to which cost functions biological systems adjust their impedance, and how intrinsic—defined by the skeletomuscular structure—matters or, conversely, how and why the nervous system modulates impedance;
- to use that knowledge to improve body—machine interfaces and to pave the way towards modern impedance teleoperated systems (including prosthetic devices, rehabilitation devices, tele-surgical robotic systems, and so on).
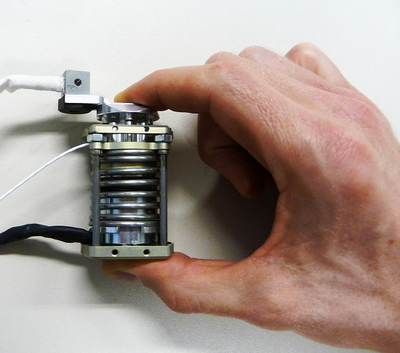
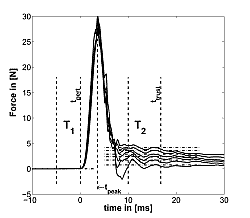
We have developed different impedance measurement methods for identifying impedance of the human fingers ([4], [5]) and arms ([6], [7], [8]). We combine classical perturbation approaches with EMG-based identification, using force-torque-sensors and optical tracking systems.

[1] Gustus, Agneta and Stillfried, Georg and Visser, Judith and Jörntell, Henrik and van der Smagt, Patrick (2012) Human hand modelling: kinematics, dynamics, applications. Biological Cybernetics. DOI: 10.1007/s0042201205324.
[2] Stillfried, Georg and Hillenbrand, Ulrich and Settles, Marcus and van der Smagt, Patrick (2013) MRI-based skeletal hand movement model. In: The Human Hand: A Source of Inspiration for Robotic Hands Springer Tracts in Advanced Robotics. Springer.
[3] Gabiccini, Marco and Stillfried, Georg and Marino, Hamal and Bianchi, Matteo (2013) A data-driven kinematic model of the human hand with soft-tissue artifact compensation mechanism for grasp synergy analysis. In: IEEE/RSJ International Conference on Intelligent Robots and Systems (ISSN: 1042-296X). IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), November 3-8, 2013, Tokyo, Japan. ISSN 1042-296X
[4] Höppner, Hannes and Lakatos, Dominic and Urbanek, Holger and Castellini, Claudio and van der Smagt, Patrick (2011) The Grasp Perturbator: Calibrating human grasp stiffness during a graded force task. In: IEEE International Conference on Robotics and Automation (ICRA), pp. 3312-3316. Robotics and Automation (ICRA), 2011 IEEE International Conference on, Shanghai, China.
[5] Höppner, Hannes and McIntyre, Joseph and van der Smagt, Patrick (2013) Task Dependency of Grip Stiffness—A Study of Human Grip Force and Grip Stiffness Dependency during Two Different Tasks with Same Grip Forces. PLoS ONE, 8 (12), e80889. Public Library of Science. DOI: [10.1371/journal.pone.0080889]. ISSN 1932-6203.
[6] Höppner, Hannes and Lakatos, Dominic and Urbanek, Holger and van der Smagt, Patrick (2010). The Arm-Perturbator: Design of a Wearable Perturbation Device to measure Limb Impedance. International Conference on Applied Bionics and Biomechanics (ICABB)
[7] Lakatos, Dominic and Petit, Florian and van der Smagt, Patrick (2011) Conditioning vs. Excitation Time for Estimating Impedance Parameters of the Human Arm. In: Proceedings. Humanoids 2011, International Conference on Humanoid Robots, 26. Okt. - 28. Okt. 2011, Bled, Slovenia.
[8] Lakatos, Dominic and Rüschen, Daniel and Bayer, Justin and Vogel, Jörn and van der Smagt, Patrick (2012) Identification of human limb stiffness in 5 DoF and estimation via EMG. ISER 2012, 17.-21. Jun. 2012, Quebec City, Canada.