
Anwendungen
Die Komplexität und Fertigkeiten des Roboters David erfordern die Untersuchung speziallisierter Wahrnehmungs- und Planungsmethoden, die das Potential des Roboters voll auszunutzen.
Wahrnehmung
David verwendet Computer Vision, taktile Sensoren und Propriozeption, um sich selbst und seine Umgebung wahrzunehmen. Während des Betriebs fusioniert er all diese Informationen, um kontinuierliche die Lage seines Körpers und relevanter Objekte zu schätzen. Dank dieser Daten kann David komplexe Manipulationsaufgaben erfüllen und dynamisch auf seine Umgebung reagieren. Das System erlaubt das Tracking von untexturierten Objekten, ist robust gegenüber Verdeckungen und erfüllt Echtzeitanforderungen.

Für die Wiedergabe dieses Videos auf Youtube.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
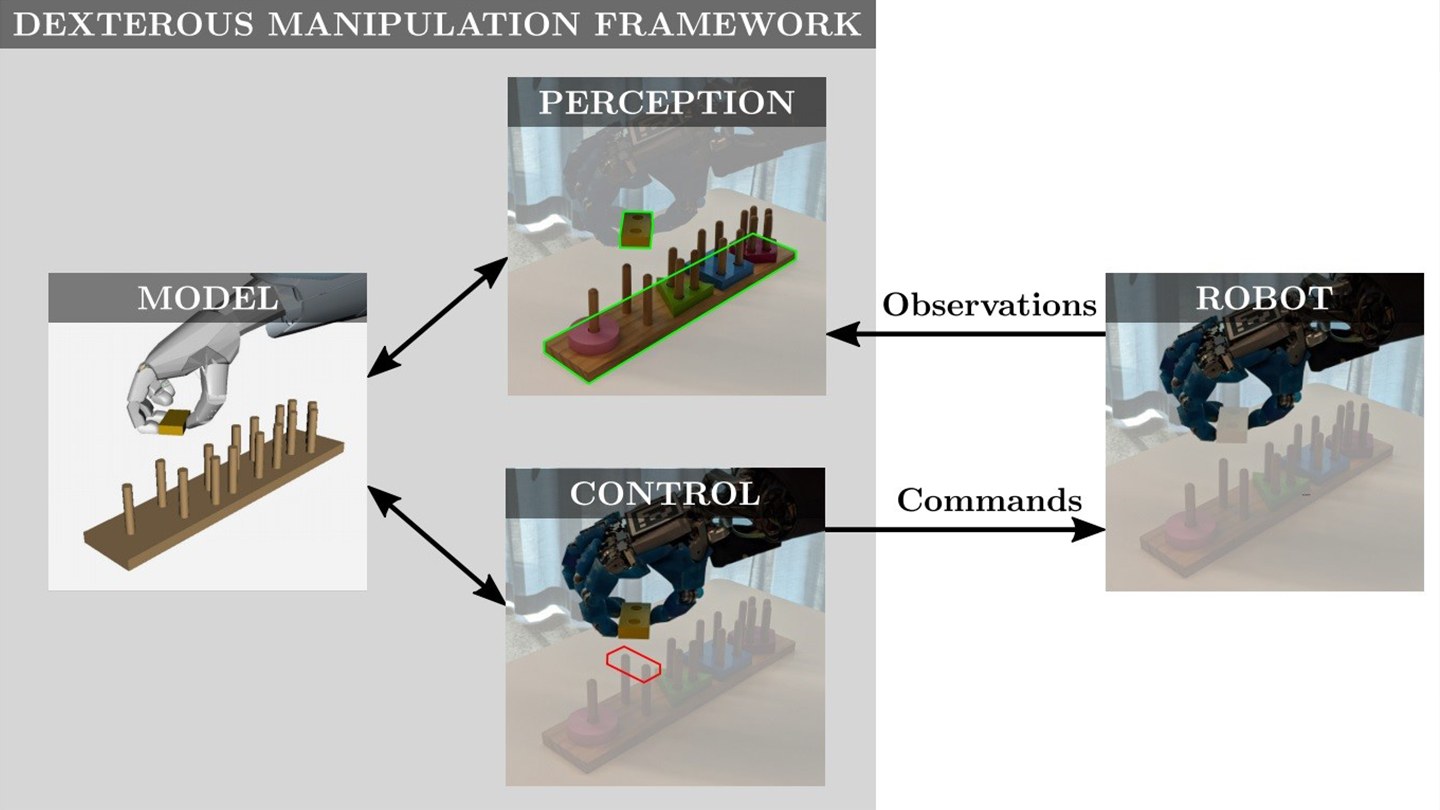
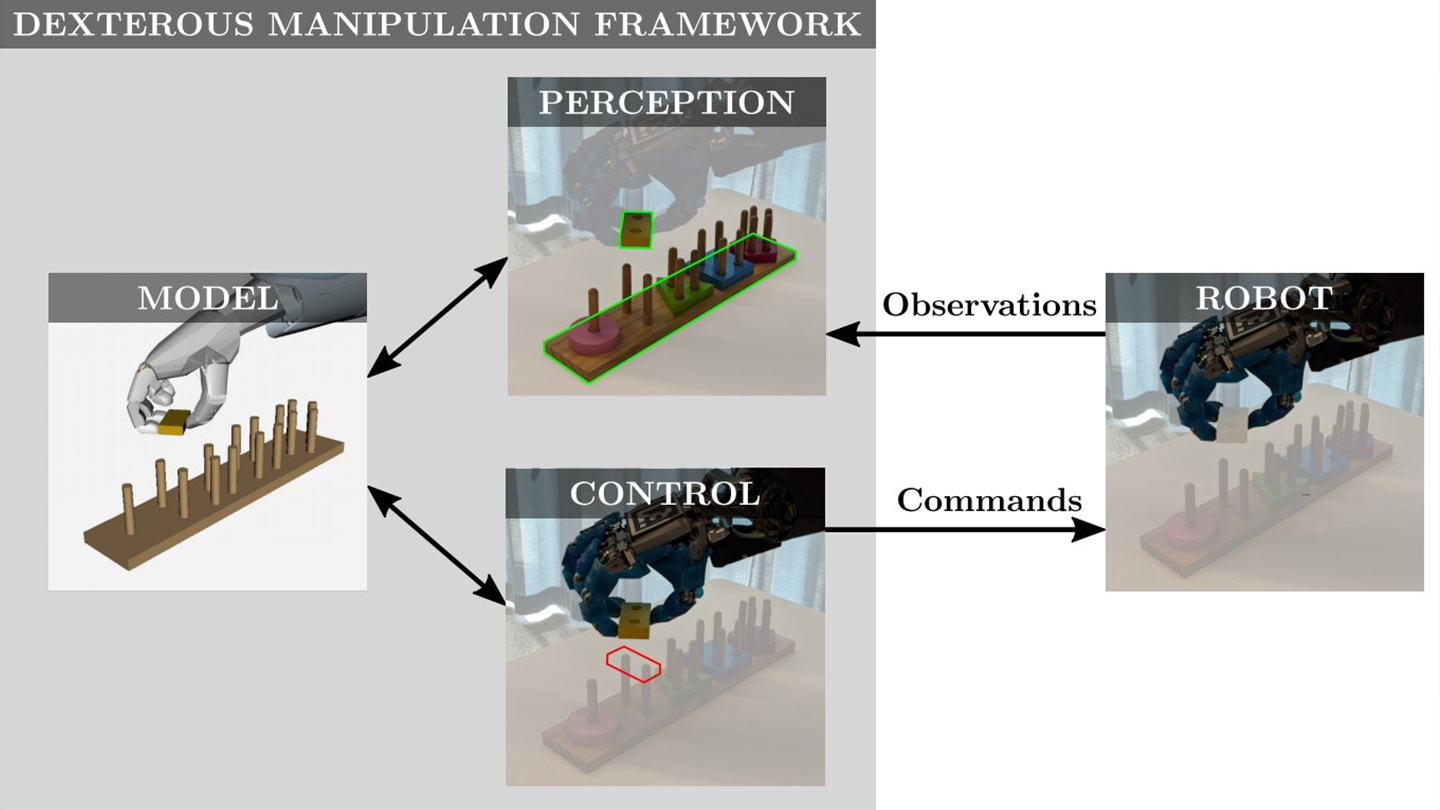
Geschickte Manipulation
Unsere Fähigkeit, Objekte mit unseren Händen geschickt zu manipulieren, ist ein wesentliches Element unseres täglichen Lebens. Um Robotersysteme nahtlos in unseren Alltag integrieren zu können, benötigen sie ähnliche Fähigkeiten. Um Robotern die präzise Manipulation von Objekten zu ermöglichen, sind jedoch eine Reihe von algorithmischen Fähigkeiten erforderlich, die den kognitiven Kompetenzen des Menschen entsprechen. Um dieses Ziel zu erreichen, entwickeln wir ein Framework zur geschickten Manipulation, das die präzise Regelung von gegriffenen Objekten mit Roboterhänden ermöglicht. Grundlegend erfordert die Realisierung einer anspruchsvollen Manipulationsaufgabe Wissen über den Zustand des Griffes. Unsere Methode zur Schätzung des Greifzustands integriert Informationen aus taktiler Sensorik, Propriozeption und visueller Wahrnehmung in eine gemeinsame Formulierung. Unter Verwendung des geschätzten Greifzustands realisiert der entwickelte modellbasierte Regler die nachgiebige Positionierung des Objekts in der Hand.
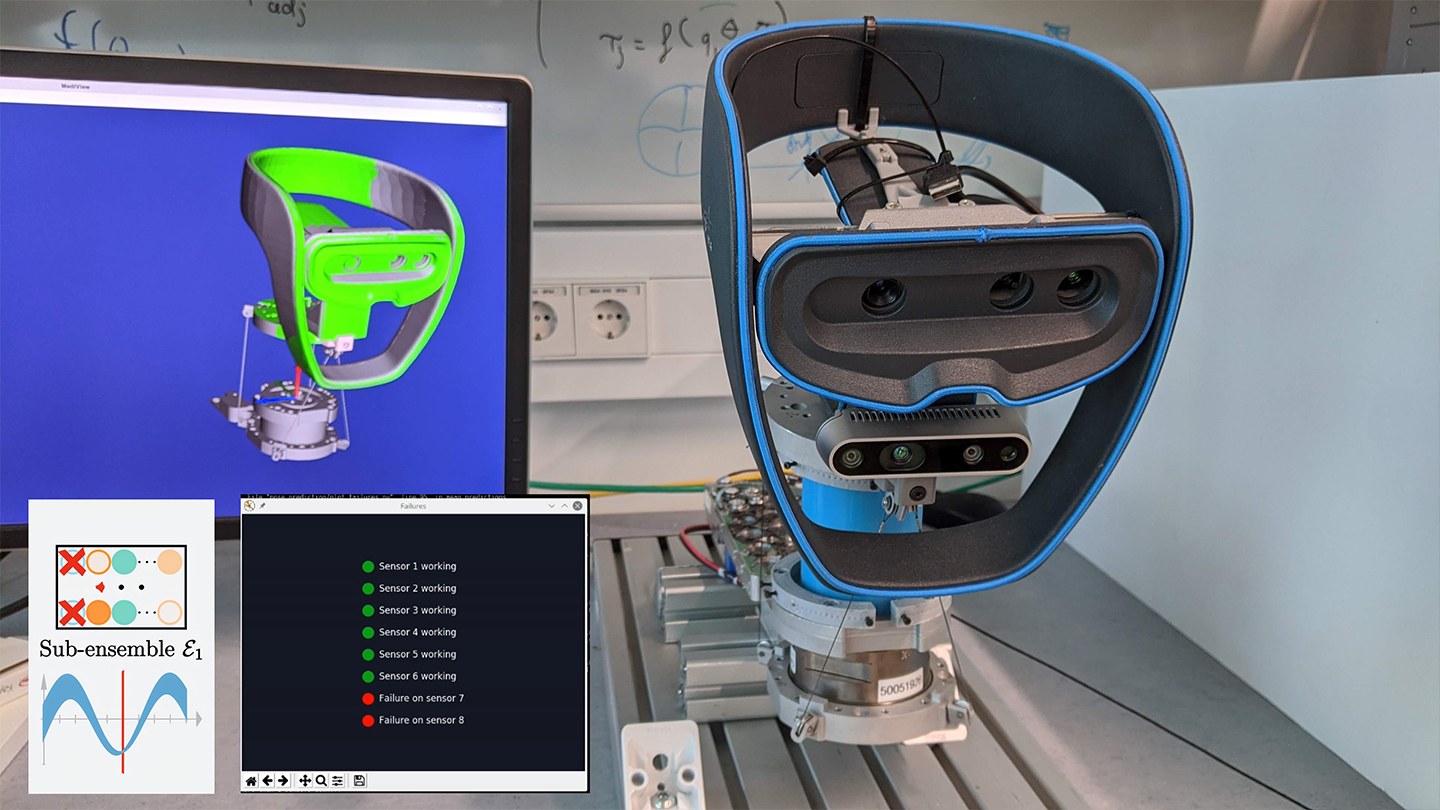
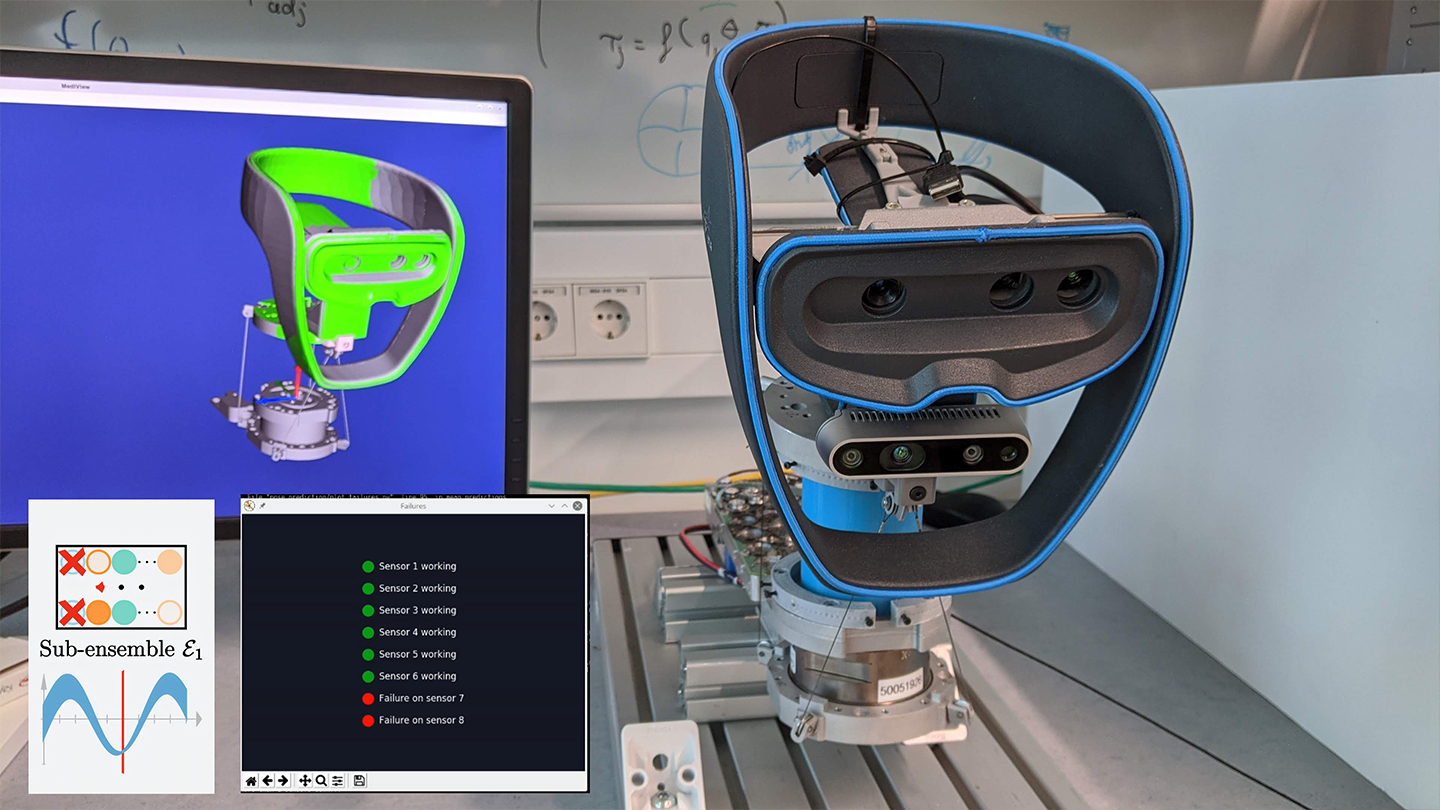
Lernender Roboter
Die Komplexität des elastischen Halses macht ihn zu einem guten Kandidaten für die Anwendung von Methoden des maschinellen Lernens, wann die Modellierung des Roboterverhaltens schwierig sein kann. Es werden Methoden wie Ensembling zur Vorhersage der Pose und der Handhabung von Fehlern zusammen mit Reinforcement Learning zum Lernen der Steuerung des Halses aus Daten untersucht.
{kind=link}
{kind=link}
Manipulation und Planung
Bei Anwendungen mit Manipulationsaufgaben ist es von Vorteil vorher zu wissen wie groß der erreichbare Arbeitsbereich, sowie die Geschicklichkeit in den verschiedenen Regionen des erreichbaren Arbeitsbereichs ist. Eine derartige Analyse ermöglicht es, dass ein Bereich des Arbeitsraums ausgewählt wird, indem die gewünschte Aufgabe in Bezug auf die Bewegungsfähigkeit des Roboters am besten ausgeführt werden kann.
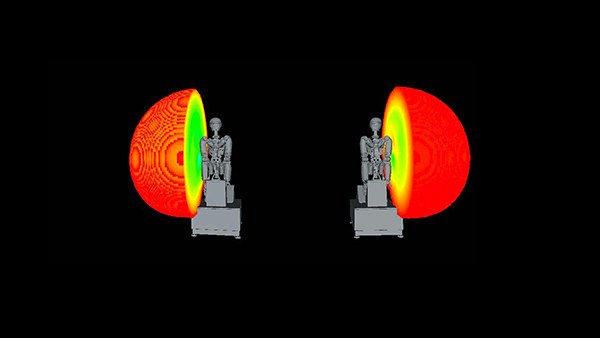
Capability Maps
Die Capability Maps bieten eine grafische Repräsentation jedes erreichbaren Punktes im diskretisierten Arbeitsraum und wie geschickt diese Punkte zu erreichen sind. Die Geschicklichkeit für jeden erreichbaren Punkt im Arbeitsraum ist mithilfe eines Capability Index farblich codiert. Der Capability Index ergibt sich aus einer Auswertung der möglichen Endeffektor-Orientierungen an jedem Punkt im erreichbaren Arbeitsbereich. Die resultierende prozentuale Belegung ergibt den Capability Index und die Farbe des diskretisierten Punktes (entsprechend einer Farbskala). Die grünen Regionen im Bild deuten auf Bereiche des Arbeitsraums, die für den Endeffektor in verschiedenen Orientierungen erreichbar sind und somit einen höheren Capability Index haben als die Regionen an den Rändern der Karte.

Ausgewählte Veröffentlichungen
Manuel Stoiber, Martin Pfanne, Klaus H. Strobl, Rudolph Triebel, Alin Albu-Schäffer, "A Sparse Gaussian Approach to Region-Based 6DoF Object Tracking", in Proceedings of the Asian Conference on Computer Vision (ACCV), Kyoto, Japan, November 2020.
Pfanne, M., Chalon, M., Stulp, F., Ritter, H., and Albu-Schäffer, A. "Object-level impedance control for dexterous in-hand manipulation", IEEE Robotics and Automation Letters, 5(2):2987–2994, 2020.
Raffin, Antonin, Bastian Deutschmann, and Freek Stulp. "Fault-Tolerant Six-DoF Pose Estimation for Tendon-Driven Continuum Mechanisms." Frontiers in Robotics and AI 8, 2021.