MiroSurge ist ein modulares Telechirurgiesystem für minimalinvasive medizinische Eingriffe. Hierbei werden verschiedene robotische Komponenten miteinander kombiniert, inklusive drei MIRO-Roboterarme und mindestens zwei MICA-Instrumente. Im Jahr 2010 wurde MiroSurge erstmals der Öffentlichkeit präsentiert.
3 × MIRO Roboterarme mit jeweils 7 Freiheitsgraden
Mind. 2 × MICA Instrumente mit jeweils 3 Freiheitsgraden
Operationstisch mit 7 Freiheitsgraden
2 × Eingabegeräte Sigma7 mit jeweils 7 Freiheitsgraden
Besonderheiten:
Wolf Stereoendoskop
≥ 10 QNX-Echtzeitrechner
Systembeschreibung
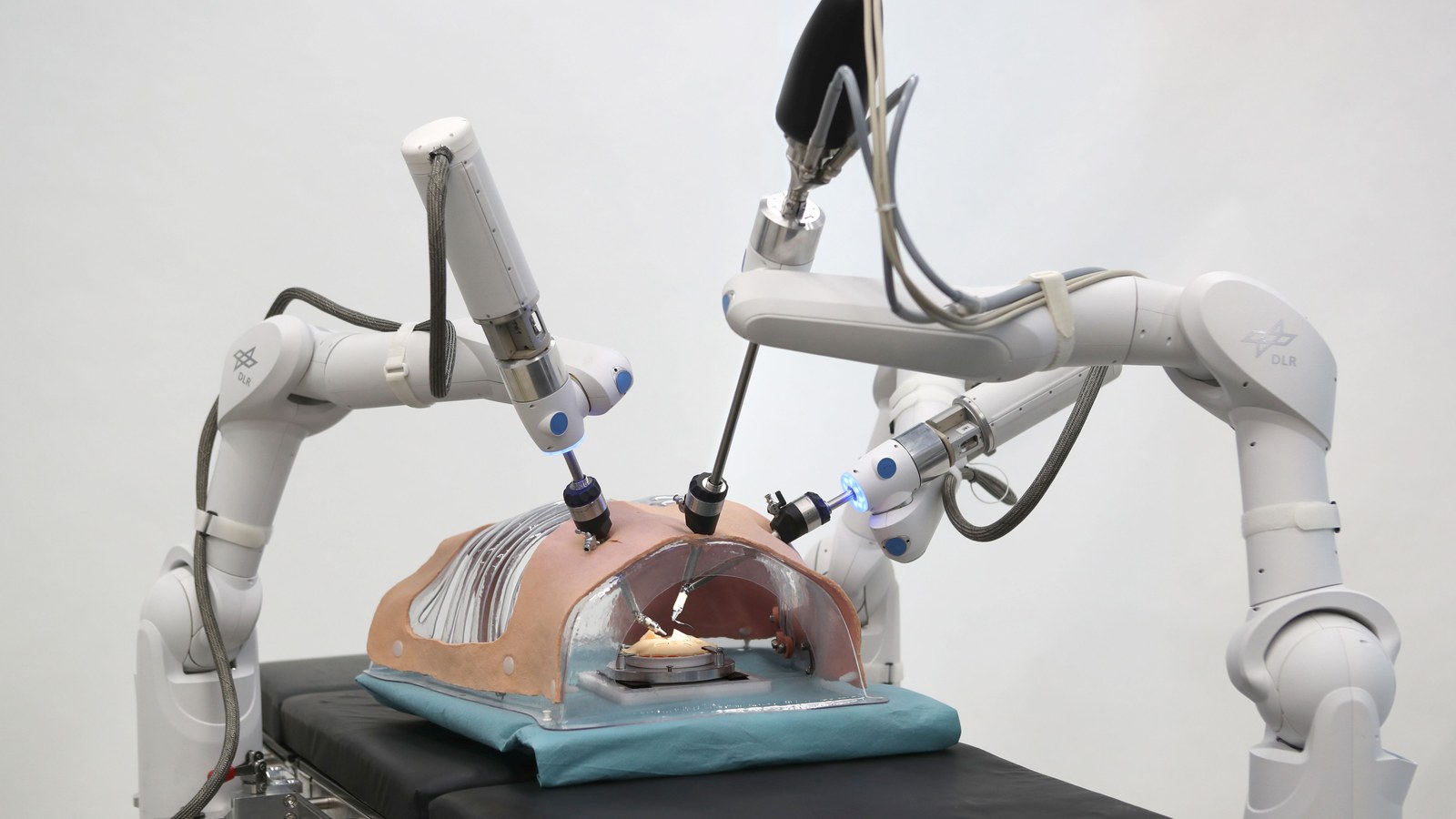
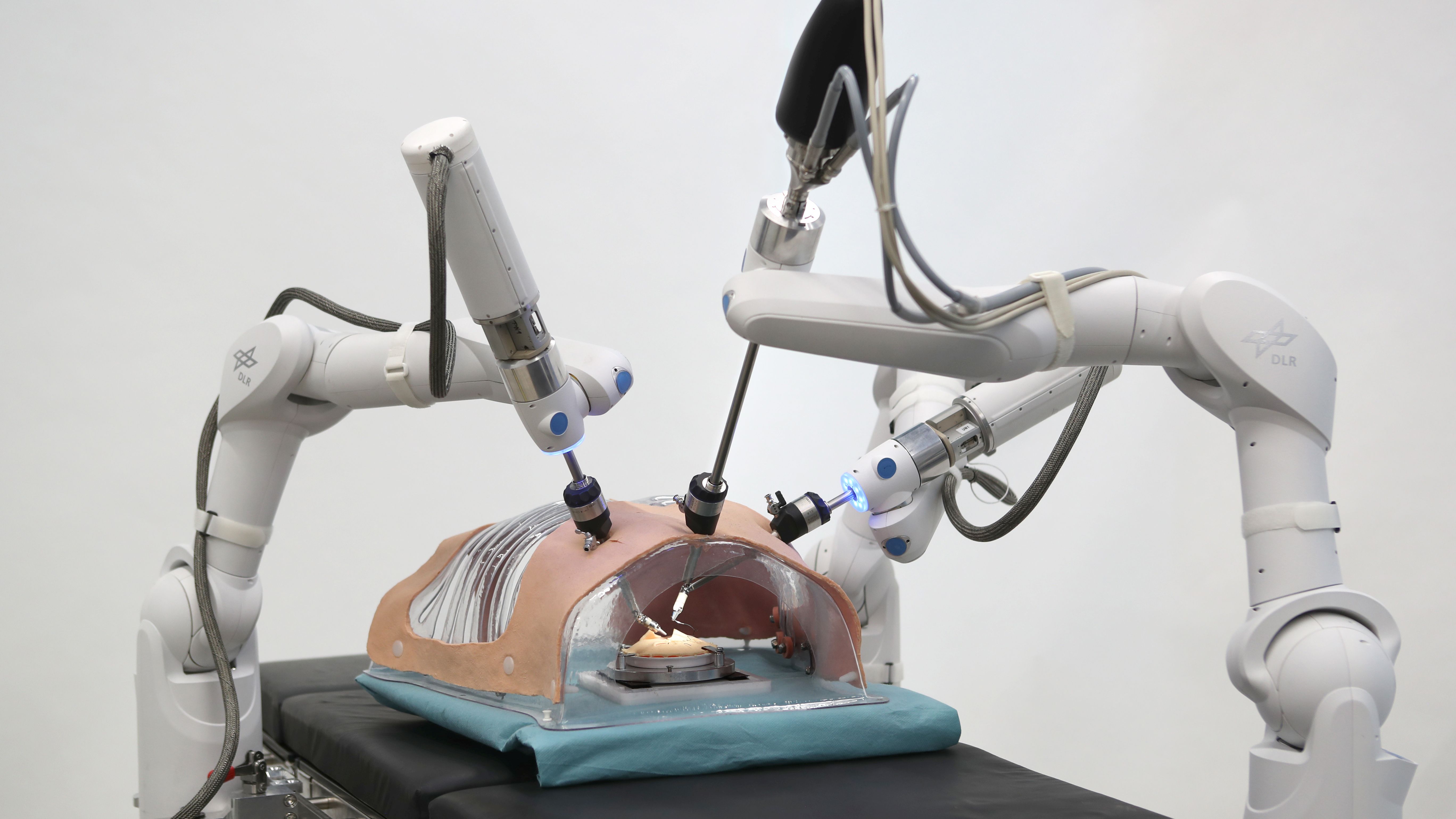
Das Telechirurgiesystem DLR MiroSurge umfasst eine Chirurgenkonsole mit einem 3D-Display und zwei haptischen Eingabegeräten sowie drei MIRO-Roboterarme. Zwei MIROs halten die laparoskopischen Instrumente (MICA), der dritte MIRO führt automatisch ein Stereoendoskop. Dem Chirurgen an der Chirurgenkonsole können sowohl der Videostream des Endoskops angezeigt werden als auch die Arbeitsraumgrenzen der Instrumente haptisch zurückgemeldet werden. Somit kann der Chirurg das Geschehen im Operationsfeld nicht nur sehen, sondern dank Kraftrückkopplung an den Eingabegeräten auch teilweise fühlen.
Laborsetup des MiroSurge Systems 1
Das DLR MiroSurge System für minimal invasive Chirurgie: Zwei Roboterarme tragen robotische DLR MICA Instrumente, der dritte Arm das Endoskop (schwarz). Dank ihres geringen Gewichts können die MIROs direkt an den Seitenschienen des OP-Tisches befestigt werden.
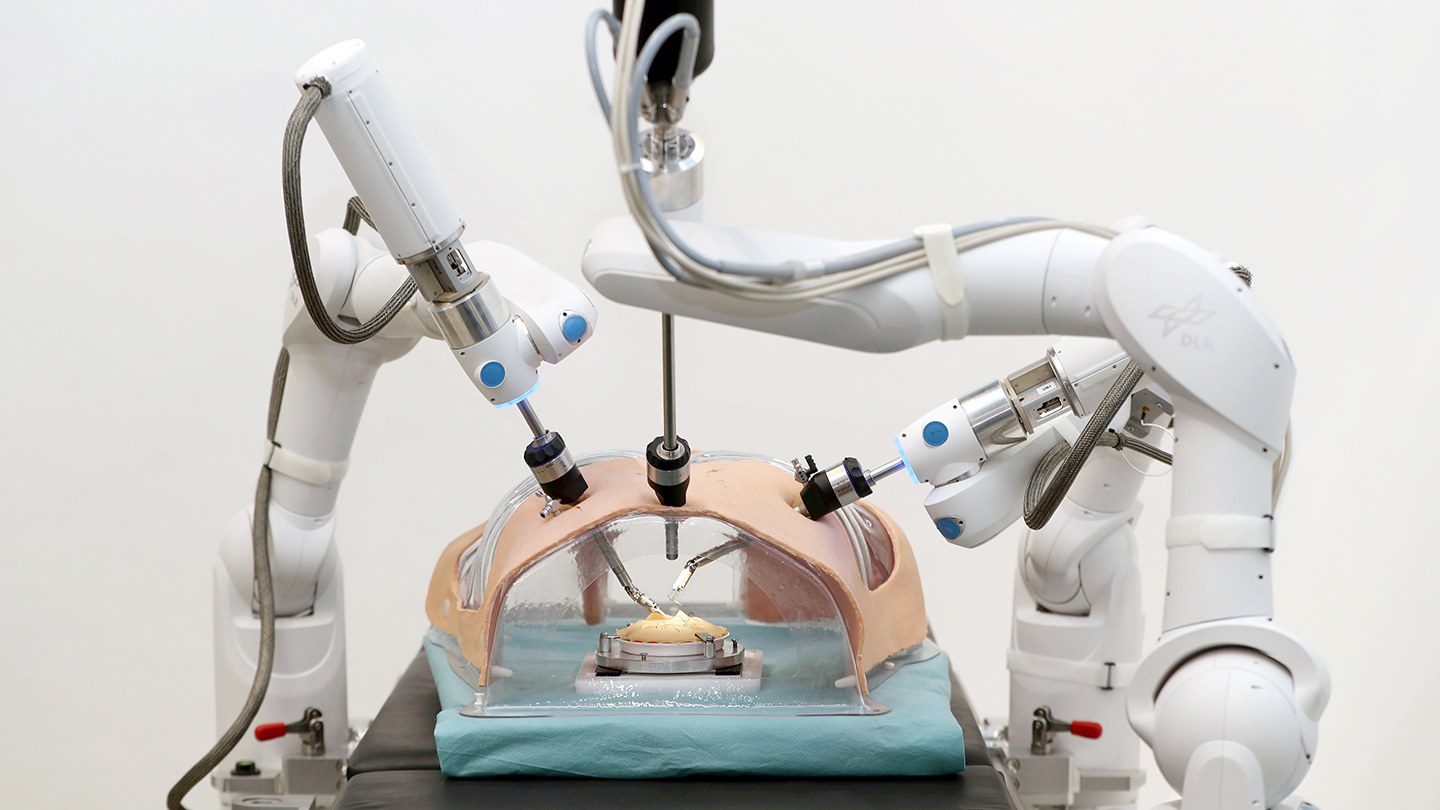
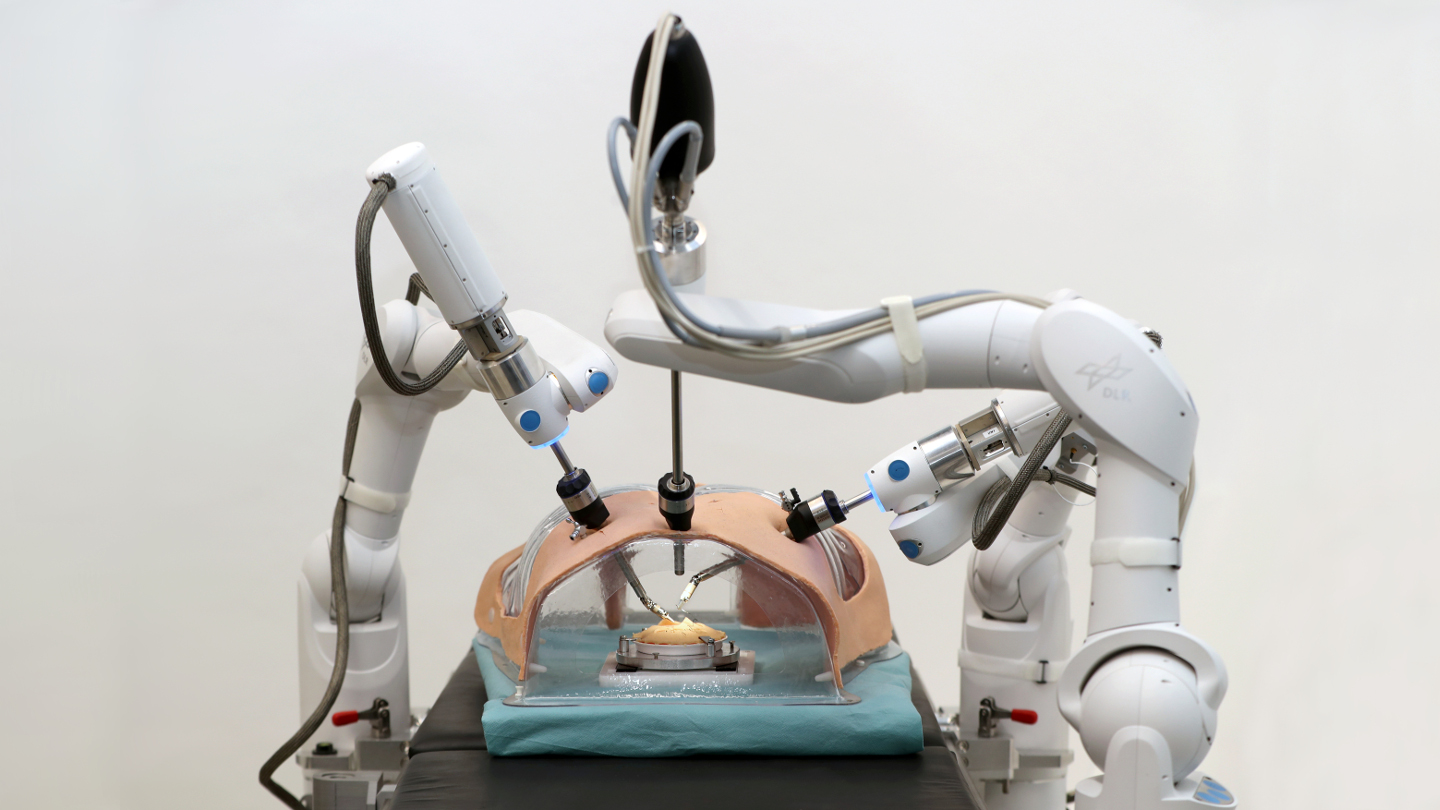
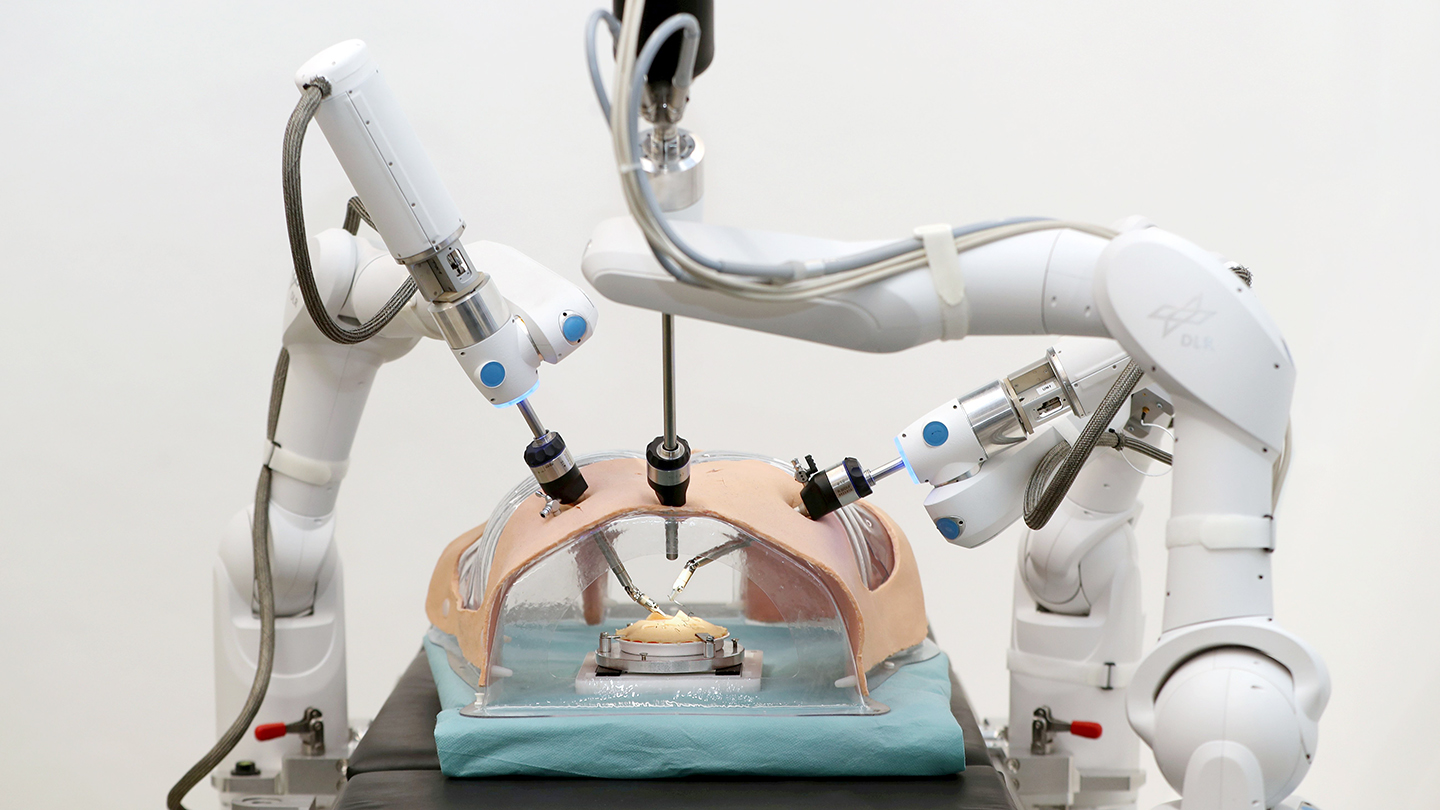
Laborsetup des MiroSurge Systems vom Kopf des „Patienten“ her gesehen: Die drei Roboterarme sind an den Seitenschienen des OP-Tisches befestigt, die Spitzen des Endoskops (Mitte) und der beiden MICA Instrumente werden durch Trokare in das Patienteninnere eingeführt.
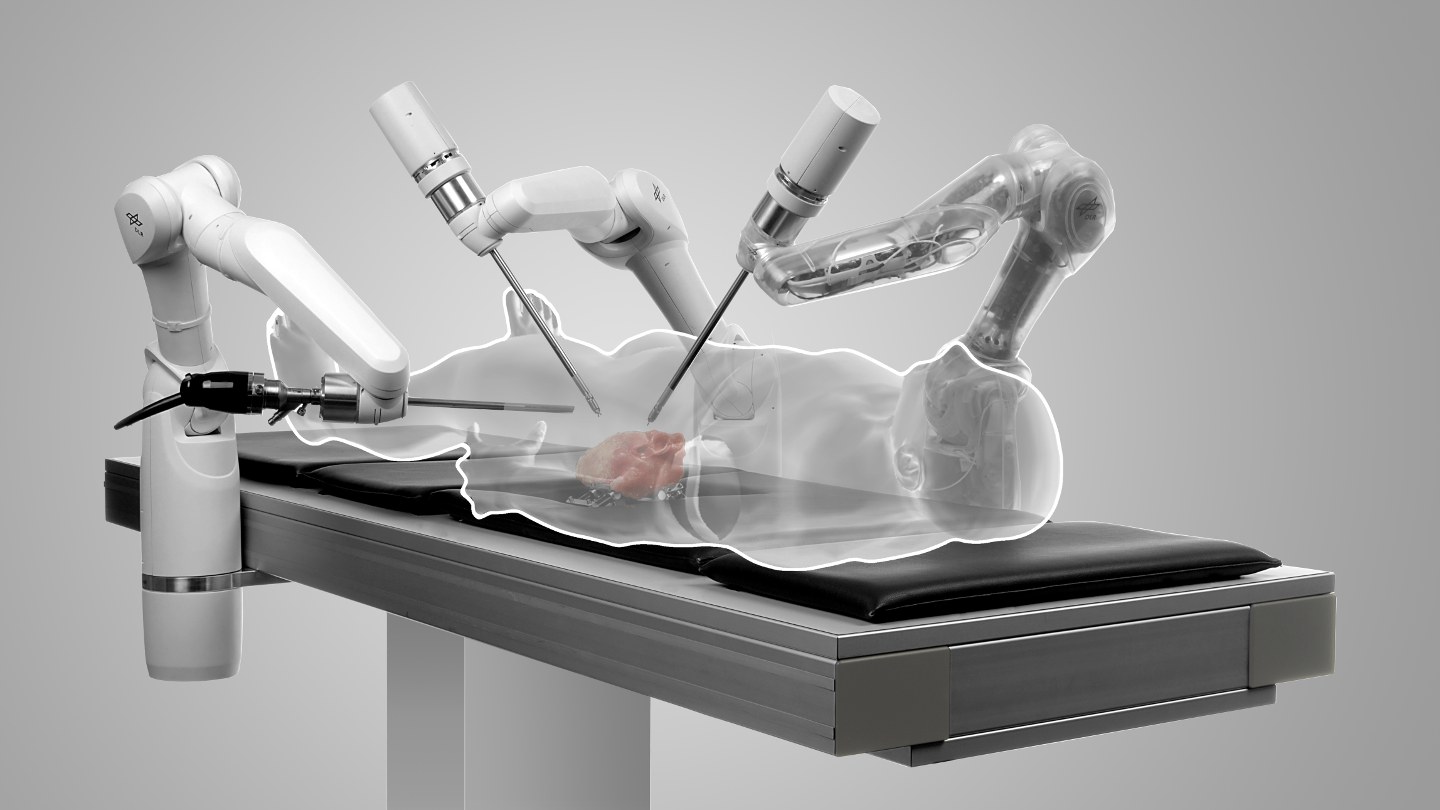
Künstlerische Darstellung eines minimal invasiven Eingriffes mit dem DLR MiroSurge System: Der linke DLR MIRO hält das Endoskop, die beiden rechten MIROs jeweils ein minimal invasives Instrument DLR MICA.
Tobergte et al., "The sigma.7 haptic interface for MiroSurge: A new bi-manual surgical console" in Proc. of the IEEE International Conference on Intelligent Robots and Systems (IROS), San Francisco, USA, pp. 3023-3030, September 2011.
Tobergte et al., "MiroSurge - Advanced User Interaction Modalities in Minimally Invasive Robotic Surgery", MIT Press Journals: PRESENCE - Teleoperators and Virtual Environments, vol. 19, no. 5, pp. 400-414, October 2010.
Hagn et al., "DLR MiroSurge - A Versatile System for Research in Endoscopic Telesurgery", International Journal of Computer Assisted Radiology and Surgery, vol. 5, no. 2, pp. 183-193, March 2010.



{kind=link}
{kind=link}
{kind=link}