Der Asteroidenlander MASCOT beinhaltet einen Mechanismus, der eine Fortbewegung auf der Asteroidenoberfläche ermöglicht. Dabei wird ein Exzenterarm durch einen Motor beschleunigt und abgebremst, wodurch ein Ruck auf das Gesamtsystem ausgeübt wird, sodass sich das System durch Hüpfen fortbewegen kann.
Die Mission startete im Jahr 2014. Eingesetzt wurde MASCOT am 3. Oktober 2018.
• Elektronik kalt redundant ausgeführt • Entkopplungsnetzwerk, sodass ein Motor von zwei unterschiedlichen Leistungsteilen gespeist werden kann • 10 krd strahlungstolerant
Systembeschreibung
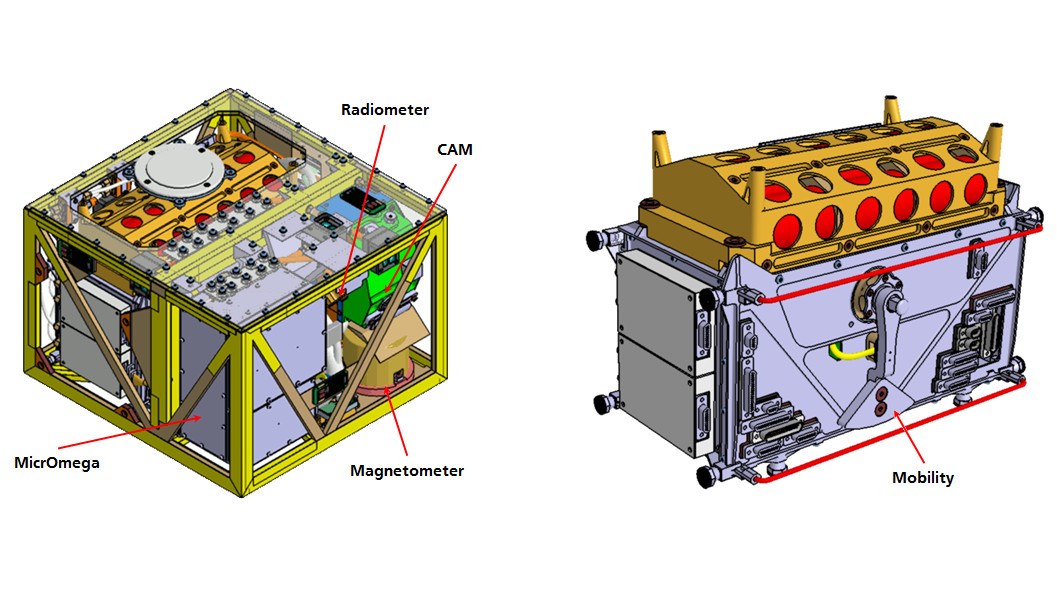
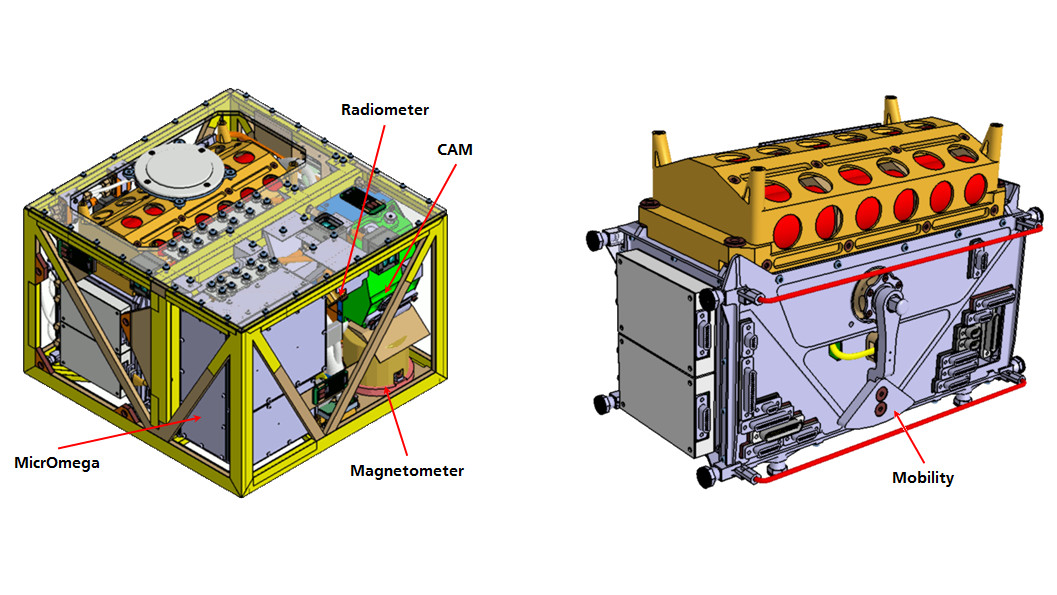
Das DLR hat als Beitrag für die japanische Hayabusa-II-Mission eine Asteroiden-Landeeinheit MASCOT (mobile asteroid surface scout) entwickelt. Die einzelnen Bestandteile von MASCOT sowie die Einordnung im Rahmen der Hayabusa-2-Mission werden vom Institut für Raumfahrtsysteme beschrieben.
Das Institut für Robotik und Mechatronik steuerte MASCOT einen Fortbewegungsmechanismus mittels einem Schwungarm bei. Der Zielasteroid 1999JU3 bzw. Ryugu weist eine sehr geringe Schwerkraft auf, sodass jede Bewegung auf dessen Oberfläche geschickt dosiert werden muss. MASCOT kann sich durch Rotation einer exzentrisch angebrachten Masse (dem Schwungarm) hüpfend fortbewegen und aufrichten. Die Exzentermasse wird gezielt beschleunigt und abgebremst. Auf diese Weise werden Momente auf die knapp 10 kg schwere Payload-Box aufgebracht. Damit wird sowohl ein Umdrehen als auch eine Fortbewegung erreicht.
Die Leistungselektronik des BLDC-Motors wurde redundant ausgeführt und ist auf einer Platine mit 95 × 105 mm kompakt untergebracht. Eine sorgfältige Auswahl der elektrischen und mechanischen Bauteile gewährleistet die Funktion bei widrigen Bedingungen.
Der Start der Mission erfolgte am 3. Dezember 2014 um 13:22:04 (JST) von Tanegashima Space Center. Im Sommer 2018 näherte sich die Sonde Hayabusa2 dem Asteroiden bis auf wenige Kilometer und fertigte erste Aufnahmen an. Der Lander MASCOT wurde am 3. Oktober 2018 um 01:58 UTC aus einer Höhe von 51 Metern erfolgreich von der japanischen Raumsonde ausgeklinkt und kam etwa 20 Minuten später auf der Asteroidenoberfläche zur Ruhe. Nach einigen Hüpfern konnte die Einheit ihre Arbeit aufnehmen und zur vollen Zufriedenheit aller beteiligten Wissenschaftler erledigen, siehe dazu auch Artikel im DLR-Hauptportal.
Weitere Informationen zum Projekt befinden sich auf der Projekt-Seite.
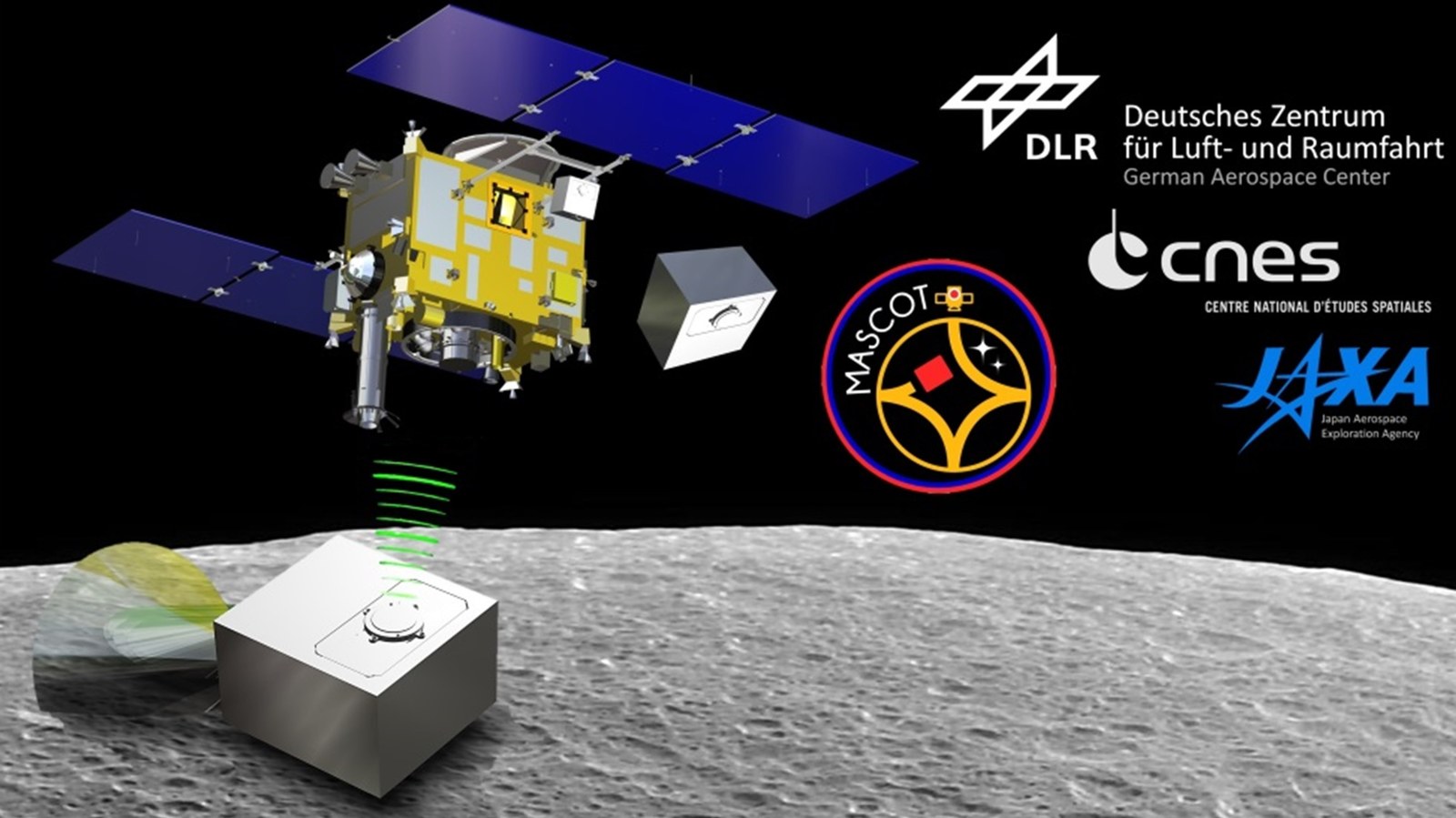
MASCOT-Szenario
Künstlerische Darstellung von Hayabusa2 und MASCOT bei der Missionsdurchführung auf dem Asteroiden.
J. Reill et al., "Development of a mobility drive unit for low gravity planetary body exploration", 12th Symposium on Advanced Space Technologies in Robotics and Automation (ASTRA), (ESA/ESTEC, Noordwijk, Netherlands), May 2013, http://elib.dlr.de/86421/.
J. Reill et al., "MASCOT – asteroid lander with innovative mobility mechanism", 13th Symposium on Advanced Space Technologies in Robotics and Automation (ASTRA), (ESA/ESTEC, Noordwijk, Netherlands), May 2015, http://elib.dlr.de/96381/.
T.-M. Ho et al., "MASCOT – the mobile asteroid surface scout onboard the HAYABUSA2 mission", Space Science Reviews, vol. 208, pp. 339-374, July 2017, http://elib.dlr.de/107136/.



{kind=link}
{kind=link}