
Automatica 2008
Auf der Automatica (10.–13. Juni 2008, Neue Messe München) ist das Institut für Robotik und Mechatronik mit vielen Exponaten präsent. Hier finden Sie eine Auswahl der Exponate. Weitere Informationen können Sie der Broschüre entnehmen.
- Mobiler humanoider Oberkörper "Justin"
- Multimodale Telepräsenz
- Chirurgierobotik mit Leichtbausystemen
- Bild- und kraftgestütztes Fügen
- Multisensorielle 5-Finger-Hand mit fünfzehn Freiheitsgraden
- Sicherheit in der unmittelbaren Mensch-Roboter Interaktion
- Der DLR Krabbler – ein Sechsbeiniger Aktiv Nachgiebiger Laufroboter
- Virtuelles Bayern
- Das DLR-Herz
- Downloads

{kind=link}
Mobiler humanoider Oberkörper "Justin"
DLR's Justin hat sich geändert: er ist jetzt mobil!
Eine grundlegende Voraussetzung für den zukünftigen Einsatz von Robotersystemen im Haushalt oder als Unterstützung von Astronauten im Weltraum ist die Beherrschung von komplexen Manipulationsaufgaben. Die internationale Robotikforschung beschäftigt sich daher zunehmend mit der Entwicklung von robusten Regelungsstrategien und intelligenten Handlungsplanungen für die beidhändige Manipulation.
Der mobile Justin mit seinen beiden nachgiebig regelbaren Leichtbauroboterarmen und den beiden vier Fingerhänden stellt für diese Forschungen eine ideale Experimentierplattform dar. Die neu entwickelte mobile Plattform ermöglicht den weiträumigen, autonomen Betrieb des Systems. Die ein- und ausfahrbaren gefederten Räder sind speziell auf die Anforderungen des Oberkörpers angepasst. PMD Sensoren und Kameras erfassen die Roboterumgebung in 3D und erlauben Justin so, selbständig vorgegebene Aufgaben zu erfüllen.
Multimodale Telepräsenz


Der DLR Leichtbauroboter eignet sich aufgrund seiner hohen Dynamik, seiner Arbeitsraumgröße und der extremen Leichtbauweise besonders gut als haptisches Eingabegerät. So ist er in der Lage, dem Menschen realitätsnah Kräfte aus entfernten Umgebungen und virtuellen Welten darzustellen. Der gleichzeitige Einsatz von Stereovisualisierung, akustischem und bimanuellem haptischen Feedback ermöglicht es dem Menschen, intuitiv in entfernten und virtuellen Umgebungen zu arbeiten.
Ein typisches Anwendungsgebiet für die Telerobotik ist die Wartung von technischen Anlagen in schwer zugänglichen oder gefährlichen Orten (z.B. Weltraum oder kerntechnische Anlagen). Diese Fernwartung wird exemplarisch im Zusammenspiel mit dem mobilen Humanoiden Justin gezeigt.
Das Arbeiten in der virtuellen Welt wird anhand einer Einbaumontagesimulation präsentiert. Durch den Einsatz der immersiven Mensch-System Schnittstelle können Montagen in digitalen Modellen verifiziert werden, noch bevor erste Prototypen gebaut sind. Bei komplexen Systemen, wie beispielsweise bei Automobilen oder Flugzeugen, werden dadurch Entwicklungszyklen stark verkürzt, Kosten reduziert und die Wart- und Montierbarkeit verbessert.
Chirurgierobotik mit Leichtbausystemen

Für den Einsatz in unterschiedlichen chirurgischen Aufgabenstellungen hat das DLR den Leichtbauroboter MIRO entwickelt. Sein geringes Gewicht und die kompakten Abmessungen erleichtern die Integration eines oder mehrerer Arme in die eingeschränkten Platzverhältnisse in einem Operationssaal. Aufgrund seines Funktionsumfanges und seiner Leistungsdaten eignet sich dieser Roboterarm sowohl für die offene Chirurgie als auch für minimal invasive Operationstechniken wie die endoskopische Herzchirurgie. Im Projekt MiroSurge integriert das DLR drei MIRO-Roboter: Zwei tragen speziell entwickelte Sensorzangen für beidhändige Manipulation mit Kraftrückkopplung, der dritte ein Stereo-Endoskop für 3D-Bildgebung.
Bild- und kraftgestütztes Fügen
Automatisierte Fügeprozesse erfordern gewöhnlich eine hohe Präzision bei der Teilezuführung und eine gute Positioniergenauigkeit der Roboter. Der DLR Leichtbauroboter erlaubt eine völlig neue Herangehensweise für anspruchsvolle Aufgaben in der industriellen Fertigung. Jedes Gelenk ist zusätzlich zu den Positionssensoren mit Momentensensoren ausgestattet und erlaubt somit einen positions-, geschwindigkeits- und kraftgeregelten Betrieb. Dadurch kann nachgiebiges Verhalten, d.h. der Zusammenhang zwischen Positionsabweichung und externer Kraft, für jeden Abschnitt der Trajektorie beliebig definiert werden.
Durch Kombination dieser Nachgiebigkeit mit einem Bildverarbeitungssystem und einer optimierten Fügeplanung können Montageaufgaben effizient gelöst werden. Die Bildverarbeitung erkennt die Objekte und bewegt den Roboter zu einer vordefinierten relativen Position, während die Gelenk-Momentensensoren lokale Informationen über den Kontakt liefern. Robuste Fügetrajektorien werden offline anhand der Geometrie der zusammenzufügenden Teile erstellt. Die Planung optimiert dabei die Trajektorien und Nachgiebigkeitsparameter so, dass die Robustheit des Fügeprozesses maximiert wird.
Multisensorielle 5-Finger-Hand mit fünfzehn Freiheitsgraden

Auf der technischen Basis der DLR-HIT-Hand I haben das HIT (Harbin Institute of Technology) und das DLR-Institut für Robotik und Mechatronik eine neue Roboterhand entwickelt. Im Gegensatz zur DLR-HIT-Hand I besteht die neue DLR-HIT-Hand II jetzt aus fünf modularen Fingern mit jeweils vier Gelenken und drei Freiheitsgraden und ist dennoch kleiner und leichter.
Insgesamt 15 Motoren sind in den Fingern und in der Handwurzel integriert. Die Antriebe sind flache, kommerziell verfügbare, bürstenlose Gleichstrommotoren mit digitalen Hall-Sensoren als Kommutierungssensoren.
Jedes Gelenk ist mit einem absolut messenden Winkelsensor und einem DMS-basierten Drehmomentsensor ausgestattet. Ein echtzeitfähiger Hochgeschwindigkeitsbus wurde mit Hilfe von FPGAs implementiert.
Die 5-Finger-DLR-HIT-Hand II ist eine Weiterentwicklung der DLR-HIT-Hand I, welche derzeit in Forschungsinstituten in den USA, Spanien, Italien, Griechenland, Deutschland und China eingesetzt.
Ende 2006 wurde die DLR-HIT-Hand I mit dem iF-Design-Award 2007 ausgezeichnet und erhielt den 1. Preis des EURON Technology Transfer Award 2007 für die erfolgreiche, internationale Zusammenarbeit zwischen Forschung und Industrie.
Sicherheit in der unmittelbaren Mensch-Roboter Interaktion

Das DLR befasst sich im Rahmen mehrerer EU-Projekte (SME, PHRIENDS) mit dem Thema Sicherheit in der Mensch-Roboter-Interaktion.
- Szenario: Am DLR wurde der mit feinfühliger Drehmomentsenensorik ausgestattete Leichtbauroboter III mit Hinblick auf direkte Mensch-Roboter Interaktion entwickelt. Der neue KUKA Leichtbauroboter ist das direkte Resultat eines engen Technologietransfers des DLR Leichtbauroboters III zum Roboterhersteller KUKA Roboter GmbH. Um unser Gesamtkonzept vorzustellen, wurde ein Co-Worker Szenario entwickelt und untersucht.
- Crashtests: Standardisierte Crashtests zeigen die Grundlagen unserer Arbeiten, die zum Ziel haben, eine Basis für die Klassifikation, Standardisierung und Evaluierung von Verletzungen in der Mensch-Roboter Interaktion zu erarbeiten.
- Kollisionsdetektion und -reaktion: Der Leichtbauroboter ist mit einer schnellen und zuverlässigen Kollisionsdetektion und –reaktion ausgestattet. Der Roboter ist damit sogar in der Lage Verletzungen durch scharfe Werkzeuge zu verhindern.
- “Sicherheit fühlen”: Benutzerinteraktion ist ein integraler Bestandteil dieses Exponats, das dem Besucher die Möglichkeit gibt, zu erfahren wie der Roboter Kollisionen erkennt und wie sicher und empfindlich er auf diese reagiert.
Der DLR Krabbler – ein Sechsbeiniger Aktiv Nachgiebiger Laufroboter
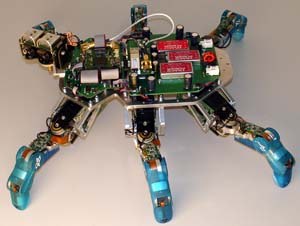
Der DLR Krabbler ist ein sechsbeiniger Laufroboter, der auf Basis der Finger der DLR Hand II entwickelt wurde. Er dient als Testplattform für die Entwicklung und Beurteilung verschiedener Lauf- und Regelstrategien sowie als Vorstufe zukünftiger laufender Explorationsroboter. Die Finger der DLR Hand II sind aufgrund ihrer Modularität sowie der Ausstattung mit Gelenkmomentsensoren und Kraft-Momenten-Sensoren mit 6 Freiheitsgraden in den Fingerspitzen sehr gut für diesen ersten Prototyp geeignet. Die umfangreiche Sensorik gestattet den Einsatz von kartesischen Impedanzreglern und Gelenkreglern mit aktiver Nachgiebigkeit. Der Krabbler wird automatisch in Echtzeit über Explorations- und Navigationsalgorithmen gesteuert, welche auf einer auf Stereokamerabildern basierenden 3D-Eigenbewegungsbestimmung und einem Verfahren zur simultanen Lokalisation und Kartenerstellung (SLAM) beruhen. Zusätzlich ermöglichen die Daten eine 3D-Modellierung der Umgebung.
Virtuelles Bayern
Das DLR enwickelt Technologien zur dreidimensionalen Erfassung realer Objekte und ihrer räumlichen Darstellung für wissenschaftliche und nichtwisschenschaftliche Anwendungen.
So werden mit der für die planetare Erkundung entwickelten Kamera HRSC hochauflösende Bilder sowohl von der Mars- als auch von der Erdoberfläche gewonnen, die mit neuartigen Methoden zu hochgenauen und volltexturierten 2.5D-Oberflächenmodellen in einer Auflösung von bis zu 15 cm verarbeitet werden.
Räumliche Darstellungen dieser Landschaften werden mit einem autostereoskopischen Display (Leihgabe Fa. SpatialView, Dresden) und unter Berücksichtigung optimal abgestimmter stereoskopischer Parameter erzeugt.
Hierbei erlaubt ein neu entwickelter, videooptischer Eyetracker schritthaltend eine präzise Nachführung der stereoskopischen Darstellung für die kontinuierliche, räumliche Wahrnehmung bei veränderlicher Betrachterposition.
Das DLR-Herz

Durch die neuartige Technik des implantierbaren DLR-Herzunterstützungssystems steht erstmalig für Patienten und Mediziner eine echte Alternative zur Herztransplantation zur Verfügung. Etwa ein Viertel der Patienten sterben während der Wartezeit auf ein Spenderorgan, welche momentan bis zu zwei Jahre betragen kann. Alternativ verbleibt nur der Einsatz einer künstlichen Blutpumpe, die den Kreislauf stabilisieren kann. Probleme mit bisher eingesetzten Unterstützungssystemen gaben Anlass zur Entwicklung des DLR-Systems, mit dem bisherige Komplikationen überwunden und eine langfristige Therapie möglich sein wird. Auf Basis der langjährigen und erfolgreichen Entwicklung innovativer Robotersysteme für die Raumfahrt transferiert das Institut für Robotik und Mechatronik mit dem DLR-Herzunterstützungssystem seine Erfahrung in die Medizintechnik. Wie in der Raumfahrt müssen dort höchste Ansprüche an Qualität, Zuverlässigkeit und Dauerbelastbarkeit erfüllt werden. Das Projekt „DLR-Herz“ wurde mitzahlreichen nationalen und internationalen Auszeichnungen gewürdigt.
Downloads
- DLR @ Automatica 2008 (2.4 MB)