
Anwendungen
In den letzten drei Jahrzehnten wurden immer mehr Roboter entwickelt, die in der Lage sind, mühsame Arbeiten in industriellen Umgebungen präziser und ermüdungsfreier auszuführen als ein menschlicher Arbeiter. Darüber hinaus bemühten sich die Forscher in den letzten Jahren auch um die Entwicklung von Robotern, die außerhalb der gut strukturierten, vorhersehbaren Umgebung einer Produktionslinie eingesetzt werden können, zum Beispiel als persönliche Assistenten zu Hause. Im Gegensatz zu den Möglichkeiten eines geplanten Maschineneinsatzes in Fertigungsprozessen ist in diesem Fall das Arbeitsfeld auf die menschliche Nutzung und Bequemlichkeit ausgelegt. Daher ist es nicht wünschenswert, die Arbeitsumgebung an die besonderen technischen Bedürfnisse eines Roboterassistenten anzupassen. Außerdem würde eine Spezialisierung dieser Maschine auf eine bestimmte Anwendung bedeuten, dass sie für jede neue Aufgabe, die sie ausführen soll, angepasst werden müsste, was ihre Akzeptanz verringern würde.
Ein naheliegender Ansatz für die Entwicklung eines Roboterassistenten, der in einer menschlichen Umgebung arbeiten soll, ist die Nachahmung menschlicher Fähigkeiten und damit vorzugsweise auch seiner Anatomie.


Die DLR Hand und Arm
Am Institut für Robotik und Mechatronik des Deutschen Zentrums für Luft- und Raumfahrt (DLR) wurden drei Generationen von Leichtbauarmen und zwei Generationen von geschickten Roboterhänden entwickelt. Beide sind bestrebt, anthropomorphe Gliedmaßen für den Einsatz als menschliche Assistenzsysteme zu entwickelt.
Bei den gewünschten Beschäftigungsmodi lassen sich zwei Hauptbetriebsarten unterscheiden:
1) Tele-Operation
Ein Bediener steuert die Bewegungen des Roboters, hier des Arms und der Finger, und empfängt die Wahrnehmungen des Geräts, z.B. visuelle Eindrücke durch eine 3-D-Projektion, akustisches Feedback, aber auch die Kräfte und Drehmomente, die auf die Fingeroberflächen und die Gelenke der Finger und des Roboterarms einwirken. Diese Betriebsart kann eingesetzt werden, wenn eine Anwesenheit aus der Ferne wünschenswert, aber gefährlich oder unmöglich ist, z.B. in menschenunfreundlichen Szenarien wie Katastrophenbewältigung oder Minenräumung, aber auch an Orten, die der Mensch nicht ohne weiteres erreichen kann, wie im Weltraum oder bei Unterwasseranwendungen. Auch kann ein Experte aus der Ferne in einem Szenario agieren, ohne physisch anwesend zu sein, wie bei der Telemedizin.
2) Autonomer Betrieb
Der Roboter durchläuft ein Training für eine bestimmte Bibliothek von Aufgaben und kann diese Aufgaben auf Befehl eines Benutzers wiederholen, wie es für Roboterassistenten wünschenswert ist. Das Ausmaß der Autonomie kann dabei von der reinen Wiederholung exakt trainierter Abläufe über eine begrenzte Analyse eines Szenarios und eine Anpassung daran, z.B. beim Fegen eines Raumes oder beim Servieren von Getränken, bis hin zur völlig autonomen Aufgabenplanung reichen.
Die mit dem DLR Arm/Hand-System durchgeführten Experimente lassen sich analog zur Arbeitsweise in teleoperierte Experimente und autonome Experimente unterteilen:
1) Tele-operierte Experimente
a) Dataglove Kontrolle
Die Bewegungen der menschlichen Hand können mit einem Gerät wie einem Datenhandschuh erfasst werden. Vergleicht man die Anatomie der DLR Hand II mit der einer menschlichen Hand, ergeben sich Unterschiede, die es zunächst schwierig machen, die Bewegungen der menschlichen Hand direkt auf die Bewegungen der Roboterhand abzubilden. Um die Bewegungen der Roboterfinger zu steuern, wurden daher zwei Methoden untersucht: Kartesisches Mapping und Gelenkwinkel-Mapping. Bei der ersten Methode wird versucht, die kartesischen Positionen der menschlichen Fingerspitzen an die der Roboterhand anzupassen, wobei die Gesten der jeweiligen Hand außer Acht gelassen werden. Diese Methode eignet sich, wenn zwei Kopien eines Objekts sowohl mit der menschlichen Hand als auch mit dem Roboter gleichzeitig mit den Fingerspitzen manipuliert werden. Für dieses Mapping wurde ein neuronales Netz verwendet. Die zweite Methode, die Gelenkwinkel-Methode, wurde auch für das Greifen mit vollem Handkontakt verwendet. Bei diesen Griffen ist die Geste der Hand wichtiger als die tatsächliche Position der Fingerspitze. In diesem Fall wurde eine lineare Zuordnung zwischen den Gelenkwinkeln des menschlichen Bedieners und des Roboters ermittelt, die es am einfachsten ermöglichte, eine Reihe von Greifbeispielen durchzuführen.
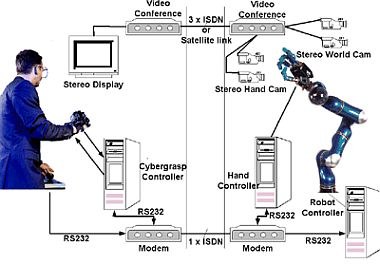
b) Telemanipulation mit Stereo Vision, Datenhandschuh und Kraftrückmeldung
In mehreren Experimenten wurden die Fähigkeiten des DLR-Arm/Hand-Systems für die Fernsteuerung getestet. Der Operator wurde an einem entfernten Ort innerhalb des Labors oder bis nach Hannover-München oder Berlin-München platziert. Das Einsatzszenario blieb an seinem ursprünglichen Standort im Labor in Oberpfaffenhofen/München. Die visuellen Ansichten der Szene wurden als Live-Bilder über ein Bündel von ISDN-Verbindungen oder eine Satellitenverbindung übertragen. Die Steuerbefehle für die Hand wurden von einem VTI Datenhandschuh empfangen und Kraftinformationen wurden an ein VTI Cybergrasp Exoskelett zurückgesendet, das eindimensionale Greifkräfte für jeden Finger anzeigen kann. Die Steuerbefehle und das (haptische) Feedback für die Hand wurden in allen Fällen über eine einzige ISDN-Verbindung übertragen. Die Pose des Arms wurde mit einem 6-D-Eingabegerät ähnlich der DLR-Raumfahrtmaus gesteuert. Um die Einrichtung zu erleichtern, wurde die Armsteuerung über eine zweite ISDN-Verbindung übertragen. In diesen Experimenten wurden verschiedene Aufgaben durchgeführt: ein Glas Wein wurde aus einer Flasche eingeschenkt, eine Schublade wurde geöffnet und Gegenstände wurden daraus entnommen, ein Mikrofon und Blumen wurden einer Person übergeben, die bei der Einrichtung der Operation anwesend war...

2) Experimente zum autonomen Betrieb
a) Fangen eines weichen Balls
Ein Experiment zur Durchführung einer völlig autonomen Aktion war das Fangen eines geworfenen Balls: Freiwillige Besucher der Hannover Messe warfen Softbälle in Richtung des DLR-Hand/Arm-Systems. Mit zwei Standard-Schwarz-Weiß-Kameras wurde die Flugbahn des fliegenden Softballs aus einer Reihe von Bildern vorhergesagt, die mit einer Standard-Videorate von 25 Bildern pro Sekunde aufgenommen wurden. Die Schätzung wurde ständig anhand neu eingehender Bilder korrigiert. So konnten der Roboter und die Hand entsprechend gesteuert werden, um den weichen Ball im Flug zu fangen. Dieses Experiment zeigte die Anwendbarkeit des DLR Arm/Hand-Systems auch für Aufgaben, die ein hohes Maß an autonomer Planung und Anpassung in einem speziellen Szenario erfordern.


b) Verfolgen und Erfassen eines Objekts
In einem speziellen Experiment wurde dem DLR-Arm/Hand-System ein Objekt, in diesem Fall ein weicher Ball, präsentiert. Zwei On-Board-Kameras lieferten ein Stereobild der Szene. Mithilfe eines visuellen Servoing-Ansatzes wurde das Objekt robust gegriffen und mit der Hand manipuliert. Dieser Ansatz war sehr tolerant gegenüber Kalibrierungsfehlern im Kamerasystem.
c) Servieren von Getränken
Eine Stereokamera beobachtete eine Szene auf einem Tisch und erkannte auf Kommando Objekte auf diesem Tisch, hier Gläser und Flaschen, und bestimmte deren Position. In einer trainierten und angepassten Sequenz wurde die Flasche gegriffen und ein Glas eingeschenkt, um die Getränke zu servieren. Die Lokalisierung erfolgte mithilfe eines speziellen Algorithmus, der die Bilder der Kamera auswertete. Um die elementaren Operationen der Aufgabe zu organisieren und anzupassen, wurde das spezielle Aufgabenprogrammierungssystem AOP verwendet.

c) Klavier spielen
Um die Eignung für Aktionen in menschlicher Umgebung ohne besondere Vorbereitung zu demonstrieren und auch um die Geschwindigkeitsfähigkeiten der DLR-Hand zu zeigen, wurde ein Experiment durchgeführt, bei dem die Hand Musikstücke auf dem Klavier spielen musste, wie zum Beispiel Beethovens Für Elise. Dabei wurde die Hand darauf trainiert, Tonleitern auf der Tastatur zu spielen. Anhand dieser Daten war die Hand in der Lage, die notwendigen Bewegungen für ganze Musikstücke zu bestimmen, die in einer Melodie notiert waren. Die dabei erreichte Spielgeschwindigkeit übertraf die Fähigkeiten menschlicher Pianisten.

{kind=link}
d) Servicerobotik in menschlichen Umgebungen
In einem größeren Aufbau wurde das DLR Hand/Arm-System auf einer mobilen Plattform montiert, eine Zusammenarbeit der Technischen Universität München und des DLR-Instituts für Robotik und Mechatronik. Das Szenario war die Demonstration eines vollwertigen Robotereinsatzes für eine körperlich behinderte oder kranke Person. In diesem Szenario musste das System die Tür eines bestimmten Raumes lokalisieren und sich dorthin bewegen, die Tür öffnen und innerhalb des Raumes das Aktionsfeld lokalisieren, hier einen Tisch, an dem es ein Getränk servierte.
e) Tisch abwischen

Entwickelte Algorithmen für die Steuerung der DLR-Hand
a) Planung begreifen
Eine sehr gewünschte Funktion für eine geschickte Roboterhand ist das autonome Greifen. Um eine solche Fähigkeit des Robotersystems zu erreichen, müssen mehrere Subsysteme entwickelt werden. Zunächst muss es ein System zur Szenenanalyse geben, das bekannte Objekte erkennen und lokalisieren kann, wie wir es für das Robutler-Szenario entwickelt haben. Wenn das Greifen von bisher unbekannten Objekten erwünscht ist, braucht man ein System, das die Geometrie eines Objekts autonom und online rekonstruieren kann. Für unsere Systeme verwenden wir den DLR-Laserscanner, um diese Aufgabe zu erfüllen.



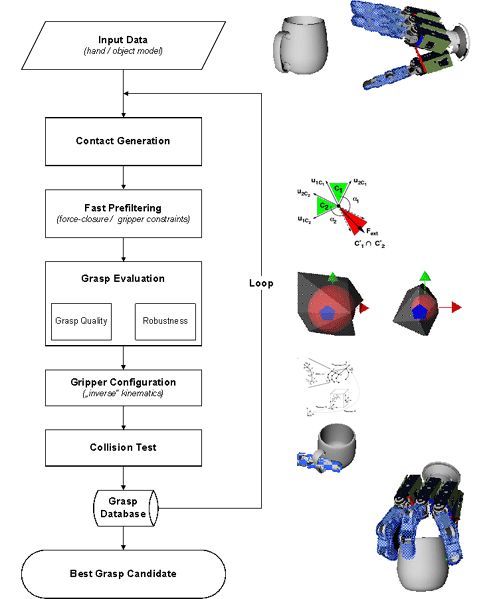
Anhand der geometrischen Informationen des Objekts, seiner Position und einiger geometrischer und kinematischer Modelle der Roboterhand können Greifer geplant werden, die ein bestimmtes Maß an Qualität gewährleisten. Diese geplanten Griffe können dann von der echten Roboterhand ausgeführt werden.
Griffe für geschickte Hände lassen sich sinnvollerweise in zwei Hauptkategorien einteilen: Präzisionsgriffe für eine hohe Manipulierbarkeit, bei denen nur die Fingerspitzen in Kontakt mit dem Objekt sind, und Kraft- oder Umfassungsgriffe, bei denen hohe Kräfte aufgefangen oder ausgeübt werden müssen und bei denen die gesamte Hand in Kontakt mit dem Objekt sein kann.
Die Planung dieser Arten des Greifens ist sehr unterschiedlich: Bei Präzisionsgriffen sucht man nach einigen wenigen Fingerspitzenkontakten (3-5), die einen stabilen Griff ermöglichen. Für die meisten dieser Kontaktsätze kann man mehr als eine gültige Handkonfiguration berechnen.
Kraftvolles Greifen wird hauptsächlich durch die geometrischen Zwänge von Hand und Objekt bestimmt. Man versucht also, eine geeignete Handkonfiguration zu finden, um die Finger um das Objekt zu wickeln", und berechnet dann die resultierenden Kontakte.
Es ist möglich, einen Planer für Präzisionsgriffe mit dem Finden von Kontakten zu beginnen und dann eine gültige Handkonfiguration zu berechnen, um den Griff zu realisieren. Wir haben außerdem festgestellt, dass etwa 20 % eines Satzes von 4 zufällig ausgewählten Kontakten an einer Reihe von geometrischen und realen Objekten zu kraftschlüssigen Griffen führen, was das gebräuchlichste Qualitätsmaß für Präzisionsgriffe ist. Daher haben wir uns entschlossen, einen zufallsbasierten modularen Greifplaner zu implementieren. Mit diesem Maß ist der Planer in der Lage, die Qualität von 100 Griffen in weniger als einer Minute zu erzeugen und zu bewerten. Der beste Greifkandidat aus dieser Menge kann dann vom Robotersystem ausgeführt werden.

{kind=link}