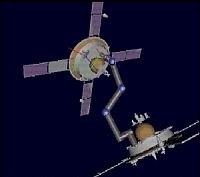
Grasping of a tumbling target satellite (DEOS/TECSAS)
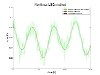
We consider three modes of operation for the grasping of a tumbling satellite: tele-operated, autonomous and semi-autonomous. The tumbling motion of the target satellite is justified by a malfunctioning of its control system, for which a small constant rotation and nutation may result.