
AROMA
Automation and Robotics for human Mars Exploration
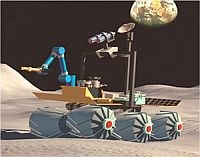


The AROMA study (2000-2002) mainly focused on the definition of robot configurations for various purposes in modular design, attached to different Mars rover types. DLR’s contribution to this ESA study consisted mainly of defining appropriate robotic devices for inspection and monitoring of facilities on Mars. The definition of smart payload concepts with low mass and flexible manipulation systems was required. Various design options have been investigated, ranging from spine robots to the modular robot design as known from DLR’s 3rd generation robots. The dexterous spine arm is constructed out of numerous elements and has a near-hemispherical work envelope. The benefit of this configuration is its excellent flexibility, low weight, and compactness. It is very well-suited for inspection tool positioning. However, due to the lack of rotational degrees of freedom it has some drawbacks for assembly and maintenance applications. The DLR modular robot arm design is based on a modular joint mechatronics design. Basically, the arms consist of roll and pitch joints elements as well as scalable limb lengths.
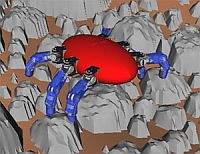
Concept of a 6-Legged Rover
In addition to the AROMA study, we have developed an innovative, 6-legged micro-rover concept.
The kinematics of the rover is based on six dexterous four-joint fingers from DLR robot hand II. The fingers, here used as legs, are attached to a central body in a beetle-like configuration and enable the overall system to manoeuvre in a rocky terrain (e.g., planetary surface). Moreover, since all of the joints are equipped with force/torque sensors, the rover’s motion can be very sensitive.
The kernel of the rover’s motion control is the Inverse Kinematics algorithm developed as part of a virtual assembly and simulation environment of the modular light-weight robot III system. The powerful algorithm can control tree-like multi-constraint kinematic systems and enables the rover to move in a natural beetle-like posture taking kinematic and dynamic preferences (e.g., minimum power consumption) and limitations (e.g., joint angle range) into account.