
Biodatenauswertung für unterstützende Robotik
Um das Potential robotischer Systeme voll auszunutzen, versuchen wir außerdem unsere Roboter für die Unterstützung im Alltag tauglich zu machen. Durch verschiedene gesundheitliche und medizinische Einschränkungen bleibt vielen Menschen die Selbständigkeit verwehrt, da bestimmte Interaktionen mit der Umwelt nicht (mehr) möglich sind, z.B. das selbständige Greifen eines Glases um zu Trinken. Für diese Personen möchten wir Systeme bereitstellen, die anstatt ihrer selbst mit der Umwelt interagieren und ihnen so ein Stück ihrer Selbstbestimmung zurückzugeben.
Um die Steuerung möglichst intuitiv zu gestalten, verwenden wir Bio-Signale dieser Personen, die wir in passende Steuerbefehle für die Roboter umwandeln. Neben der Steigerung der Kontrolle durch verbesserte Auswertung dieser Daten, versuchen wir auch neue Methoden zu identifizieren um diese Daten zu erzeugen.
Menschen mit körperlichen Einschränkungen, speziell wenn diese die oberen Gliedmaßen betreffen, sind schon bei sehr einfachen Tätigkeiten des täglichen Lebens auf die Hilfe Dritter angewiesen. Simple Interaktionen mit der Umwelt, wie zum Beispiel das Öffnen einer Tür, das Bedienen eines Fahrstuhls oder das Trinken eines Glases Wasser, sind für diese Personen nicht alleine zu bewältigen. Diesen Menschen können robotische Assistenz Systeme in Verbindung mit einem Brain-Machine Interface helfen, solche einfachen Aufgaben eigenständig auszuführen und dadurch ihre Unabhängigkeit zu erhöhen. Hierfür untersuchen wir verschiedene Methoden um Menschen mit körperlichen Einschränkungen die Steuerung von Roboterarmen zu ermöglichen.
Unser Fokus liegt dabei auf zwei unterschiedlichen Ansätzen:
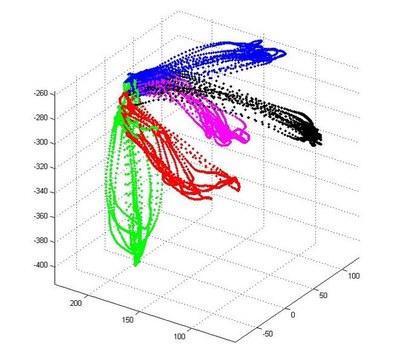
- Für Menschen mit spinaler Muskelatrophie (SMA) oder anderen anderen Erkrankungen die zur Degeneration der Muskelaktivität führen, untersuchen wir den Einsatz von Oberflächen-Elektromyographie (sEMG) als nicht invasive Steuerungsschnittstelle [1]. Bei SMA verkümmern nach und nach die Nervenverbindungen über die die Muskulatur aktiviert wird. Im Verlauf dieser Krankheit sind irgendwann nicht mehr genug Muskelzellen aktivierbar und die betroffenen Personen können sich nicht mehr eigenständig bewegen. Es verbleiben allerdings einige wenige aktivierbare Muskelzellen, deren elektrische Aktivität wir erfassen, um daraus Steuersignale für Robotersysteme zu generieren.
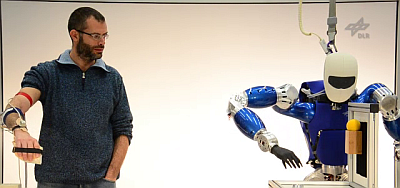
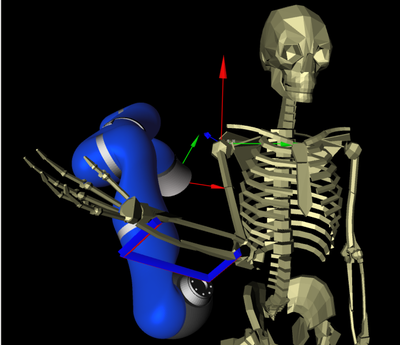
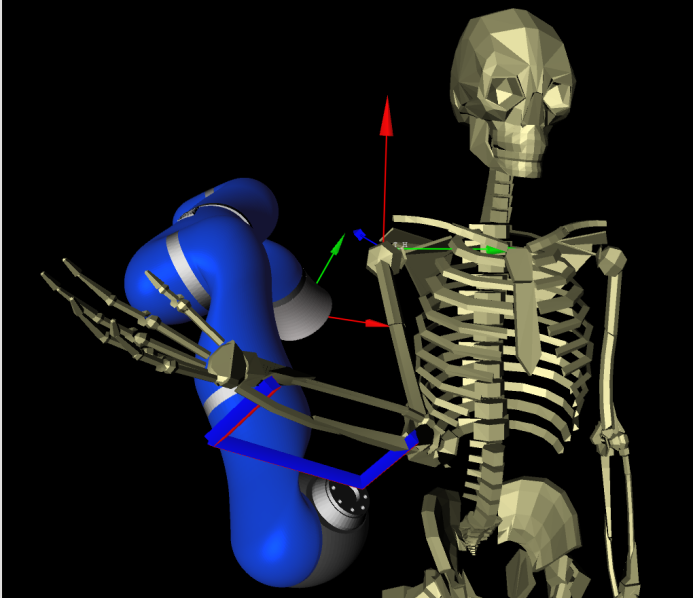
- Für Menschen bei denen Aufgrund von Krankheit (z.B. Schlaganfall) oder Rückenmarksverletzung überhaupt keine Muskelaktivität mehr erfasst werden kann, untersuchen wir den Einsatz von neuronalen Schnittstellen. In einer Kooperation mit der Brown University, haben wir es einer Frau mit Querschnittslähmung ermöglicht den DLR Leichtbauroboter zu steuern ([2], [3]). Hierfür verwenden wir das Braingate2 Neuro-Interface, das Nervensignale direkt im Gehirn erfasst. Bei diesem BCI stellt sich Benutzer Bewegungen des eigenen Arms vor, welche dann aus den Nervensignalen ermittelt und mit dem Roboter ausgeführt werden. Im Rahmen dieser Kooperation konnte eine Probandin durch Steuerung unseres Robotersystems zum Ersten mal seit 15 Jahren selbstständig eine Flasche zum Mund führen und daraus trinken.
Um die Benutzbarkeit von Assistenzrobotern zu erhöhen, erforschen wir neben den Schnittstellen auch die Nutzung von Teilautonomie innerhalb des robotischen Systems. Speziell beim Greifen und Manipulieren von Objekten haben BCIs aufgrund von fehlendem Feedback und geringer Bandbreite erhebliche Einschränkungen. Hier setzen wir an um den Nutzer des Systems zu unterstützen, indem das Robotersystem einzelne Teilaufgaben, wie das sichere Greifen oder das Absetzen eines Objekts auf einem Tisch, automatisch ausführt. Diese autonomen Aktionen werden allerdings weiterhin durch den Nutzer aktiviert, so das dieser jederzeit die vollständige Kontrolle über das System behält.



Wie können Menschen mit körperlichen Einschränkungen eine Prothese oder Rehabilitationseinrichtung steuern? Gibt es Möglichkeiten eine intuitive Steuerung kostengünstig, tragbar und online zu realisieren? Um diesen Fragen nachzugehen, beschäftigen wir uns mit peripheren Mensch-Maschine-Schnittstellen, mit dem Ziel die Steuerbarkeit von Prothesenhänden zu verbessern. Unser Ziel ist es Menschen mit Behinderung über intuitive gesteuerte Prothesen Hand- und Armfunktionalitäten zurück zu geben ohne der Notwendigkeit von Operationen, Medikamenten oder Krankenhausaufenthalten.[4]
Weiterhin wollen wir die sensomotorische Schleife mit der fehlenden/ verletzten Extremität wieder schließen; dazu gehört sowohl die direkte Steuerung (Erfassung der Bewegungsabsicht des Patienten) als auch die sensorische Rückmeldung (Umwandlung von Daten zu Gefühlen). Wir untersuchen neuartige nicht-invasive Mensch-Maschine-Schnittstellen (Oberflächen-Elektromyographie, Ultraschallbildgebung, taktile und optische Sensoren [5], [6], [7]) für die Steuerung und innovative Möglichkeiten der Bereitstellung von sensorischem Feedback, wie z.B. die Anwendung von Kraft / Vibrationen / elektrischen Stimulationen am Körper des Patienten.
Wir konzentrieren uns auch auf in der Praxis anwendbare Methoden des maschinellen Lernens [8]: inkrementell, online, schnell; einfach für den Patienten, mit Hilfe der Regression statt Klassifizierung und Anwendung von nicht-linearen Ansätze, wenn erforderlich. Unser Ziel ist die gleichzeitige und proportionale Steuerung, im Gegensatz zu sequentiellen diskreten Methoden.

Unsere Zielpatienten sind Patienten mit Amputationen der oberen Extremitäten ([9], [10]), Patienten mit neuropathischen Schmerzen, Schlaganfallspatienten, oder auch Patienten mit Rückenmarksverletzungen und neuromuskulärer Degeneration.

{kind=link}
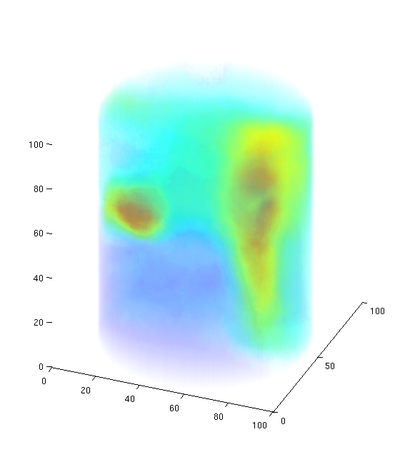
Unsere Gruppe beschäftitgt sich nicht nur mit der reinen Auswertung biologischer Daten, sondern sie arbeitet auch daran, die Aufzeichnungmethoden voranzutreiben. Der momentane Stand der Technik bei Oberfächen-EMG erlaubt nur einen sehr groben Blick auf die zugrundeliegende Muskelaktivität, da es die Summe aller Muskelaktivitäten aus dem Einflußbereich der jeweiligen Oberflächenelektrode wiedergibt.
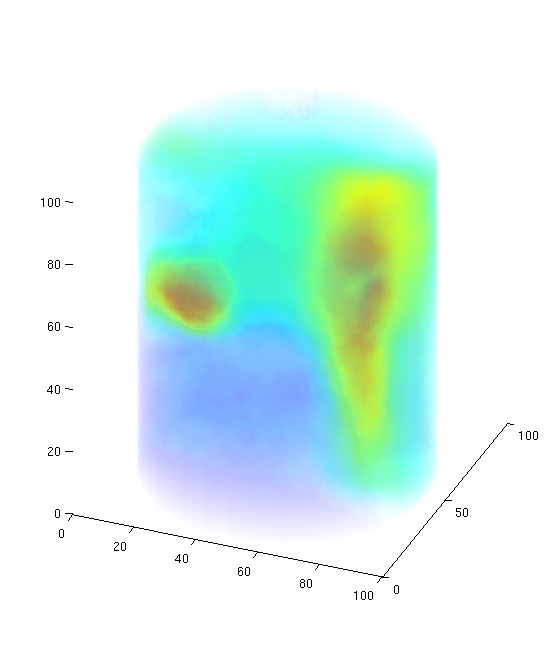
Wir arbeiten an einer 3D Rekonstruktion der erzeugenden Potentiale im Gewebe [11], um erkennen zu können, welche Muskeln während einer spezifischen Bewegung aktiv sind. Durch die Verwendung von sehr vielen Oberflächenelektroden, verbunden mit einer mathematischer Modellierung, wollen wir Muskeln, die unter anderen Muskeln liegen, sichtbar machen.
Dadurch bekommen wir ein besseres Verständnis der Funktionsweise und Einflüsse tieferer Muskeln, ohne dass ein invasives Nadel-EMG benötigt wird. Wir nennen diese neuartige Rekonstruktion der Muskelpotentiale "bildgebendes EMG", oder kurz: "iEMG" (vom englischen imaging EMG).
{kind=link}
Jedes Jahr erleiden weltweit ca. 15 Mio. Menschen ihren ersten Schlaganfall. Häufig tragen die Betroffenen bleibende Lähmungserscheinungen davon. Nur durch regelmäßiges und repetitives Training können die Patienten die Kontrolle über ihre eigenen Gliedmaßen (zum Teil) zurückerlangen. Nur so können sie wieder unabhängiger von der Unterstützung anderen Personen werden.
Um diesen Menschen zu helfen, wollen wir die Bewegungstherapie der oberen Extremität durch einen sich an die Bedürfnisse der Patienten anpassenden Roboter verstärken. Durch Impedanzregelung können wir einstellen, wie genau der Patient bei einer Bewegung dem vorgegebenen Bewegungspfad folgen muss. Dadurch ermöglichen wir „Wiederholung ohne Wiederholung“ (Bernstein 1967), die für das Wiedererlernen von Bewegungsabläufen notwendig ist, und gleichzeitig eine natürliche Bewegung der Arme. Mit Hilfe von verschiedenen Kraftmustern, z.B. unterstützende und widerstrebende Kräfte, kann das Training individuell an die Bedürfnisse des Patienten angepasst werden. Dabei können unter anderem die Trainingsaufgabe und die Menge der Unterstützung variiert werden.
{kind=link}
Da das frühe, selbst induzierte Training sehr wichtig für die Rehabilitation ist, liegt unser Hauptaugenmerk auf der EMG-Verarbeitung und die Zuordnung zu Therapieparametern. Auch wenn der Patient noch nicht in der Lage ist seinen Arm selbst zu bewegen, weil ihm die notwendige Kraft, bzw. Koordinationsfähigkeit fehlt, können wir durch Beobachtung des EMG-Signals feststellen ob der Patient sich bewegen möchte und welche Bewegung er gerade versucht. So können wir sicherstellen, dass der Patient aktiv am Training teilnimmt. Neben der quantitative Analyse des Rehabilitationsfortschritts, möchten wir diese Daten auch nutzen um die Bereiche im Arbeitsraum identifizieren, die im Training besonders berücksichtigt werden müssen und dadurch die Aufgaben automatisch anpassen, z.B. nur Bewegungen trainieren, in denen der Ellenbogen mehr als 90° gebeugt wird.
Wenn bei einem halbseitig gelähmten Patienten zusätzlich der nicht betroffene Arm überwacht wird, kann der Roboter den betroffenen Arm auch beim Kopieren dieser Bewegung unterstützen. Dies verstärkt die kortikale Neuordnung zusätzlich und gibt dem Patienten die Möglichkeit selbstbestimmter zu trainieren und das zu üben, wo er besondere Schwächen in seinem Alltag sieht.
Literatur
[1] Vogel, Jörn and Bayer, Justin and van der Smagt, Patrick (2013) Continuous robot control using surface electromyography of atrophic muscles. In: IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 845-850. IEEE. International Conference on Intelligent Robots and Systems (IROS), 3.-7.11.2013, Tokyo, Japan.
[2] Vogel, Jörn and Haddadin, Sami and Simeral, J D and Stavisky, S D and Bacher, D and Hochberg, L R and Donoghue, J P and van der Smagt, Patrick (2010) Continuous Control of the DLR Light-weight Robot III by a human with tetraplegia using the BrainGate2 Neural Interface System. In: 12th International Symposium on Experimental Robotics (ISER). Springer-Verlag Berlin Heidelberg. The 12th International Symposium on Experimental Robotics, Montreal.
[3] Hochberg, Leigh R. and Bacher, Daniel and Jarosiewicz, Beata and Masse, Nicolas Y. and Simeral, John D. and Vogel, Joern and Haddadin, Sami and Liu, Jie and Cash, Sydney S. and van der Smagt, Patrick and Donoghue, John P. (2012) Reach and grasp by people with tetraplegia using a neurally controlled robotic arm. Nature, 485 (7398), pp. 372-375. Nature publishing group. DOI: 10.1038/nature11076.
[4] Castellini, Claudio and Patrick, van der Smagt (2008) Surface EMG in advanced hand prosthetics. Biological Cybernetics, Volume (Number), pp. 35-47. Springer Berlin / Heidelberg.
[5] Gijsberts, A.; Bohra, R.; González, D. S.; Werner, A.; Nowak, M.; Caputo, B.; Roa, M. & Castellini, C. Stable myoelectric control of a hand prosthesis using non-linear incremental learning Frontiers in Neurorobotics, 2014, 8
[6] González, D. S. & Castellini, C. A realistic implementation of ultrasound imaging as a human-machine interface for upper-limb amputees Frontiers in Neurorobotics, 2013, 7
[7] Castellini, C. & Kõiva, R. Using a high spatial resolution tactile sensor for intention detection Proceedings of ICORR - International Conference on Rehabilitation Robotics, 2013, 1-7
[8] Castellini, C.; Fiorilla, A. E. & Sandini, G. Multi-subject / Daily-Life Activity EMG-based control of mechanical hands Journal of Neuroengineering and Rehabilitation, 2009, 6
[9] Castellini, C.; Gruppioni, E.; Davalli, A. & Sandini, G. Fine detection of grasp force and posture by amputees via surface electromyography Journal of Physiology (Paris), 2009, 103, 255-262
[10] Castellini, Claudio and van der Smagt, Patrick (2013) Evidence of muscle synergies during human grasping. Biological Cybernetics, 107 (2), pp. 233-245. Springer. DOI: 10.1007/s00422-013-0548-4. ISSN 0340-1200.
[11] Holger Urbanek, Verfahren zur rechnergestützten Verarbeitung von mit einer Mehrzahl von Elektroden gemessenen Aktionspotentialen des menschlichen oder tierischen Körpers, 2012, Patent: DE102012211799A1