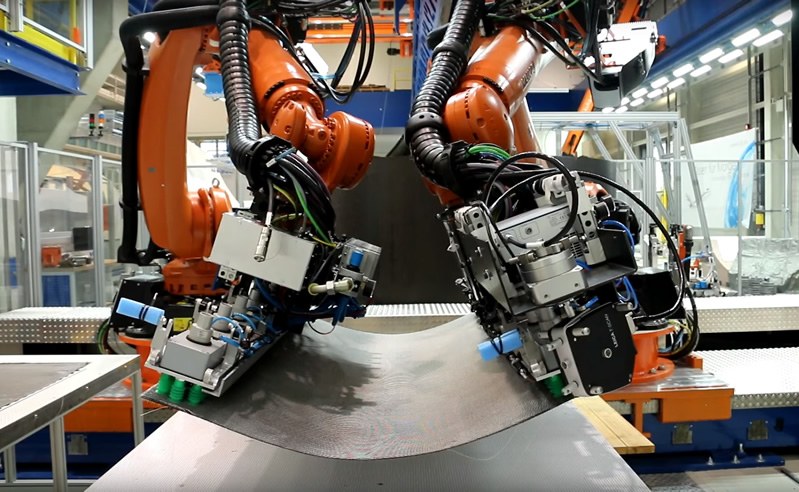
In der Luftfahrtindustrie werden auch heute noch viele Arbeiten, die das Ablegen von großflächigen Kohlenstofffasermatten erfordern, in Handarbeit erledigt. Der Einsatz von Robotern verspricht hier Fortschritte in der Effizienz und der Genauigkeit der Prozesse im Kontext der kohlenstofffaserverstärkten Kunststoffe (CFK). Erste Forschungen, die unter anderem auch am Zentrum für Leichtbauproduktionstechnologie (ZLP) des Deutschen Zentrums für Luft- und Raumfahrt (DLR) in Augsburg durchgeführt wurden, beschäftigen sich hauptsächlich mit den prozessspezifischen Problemen und nicht mit dem Scheduling und der Digitalisierung der einzelnen Schritte. Insbesondere die Steuerung von Roboterteams, die notwendig sind, um große Kohlenstofffaserzuschnitte handhaben zu können, ist ein vernachlässigtes Thema.
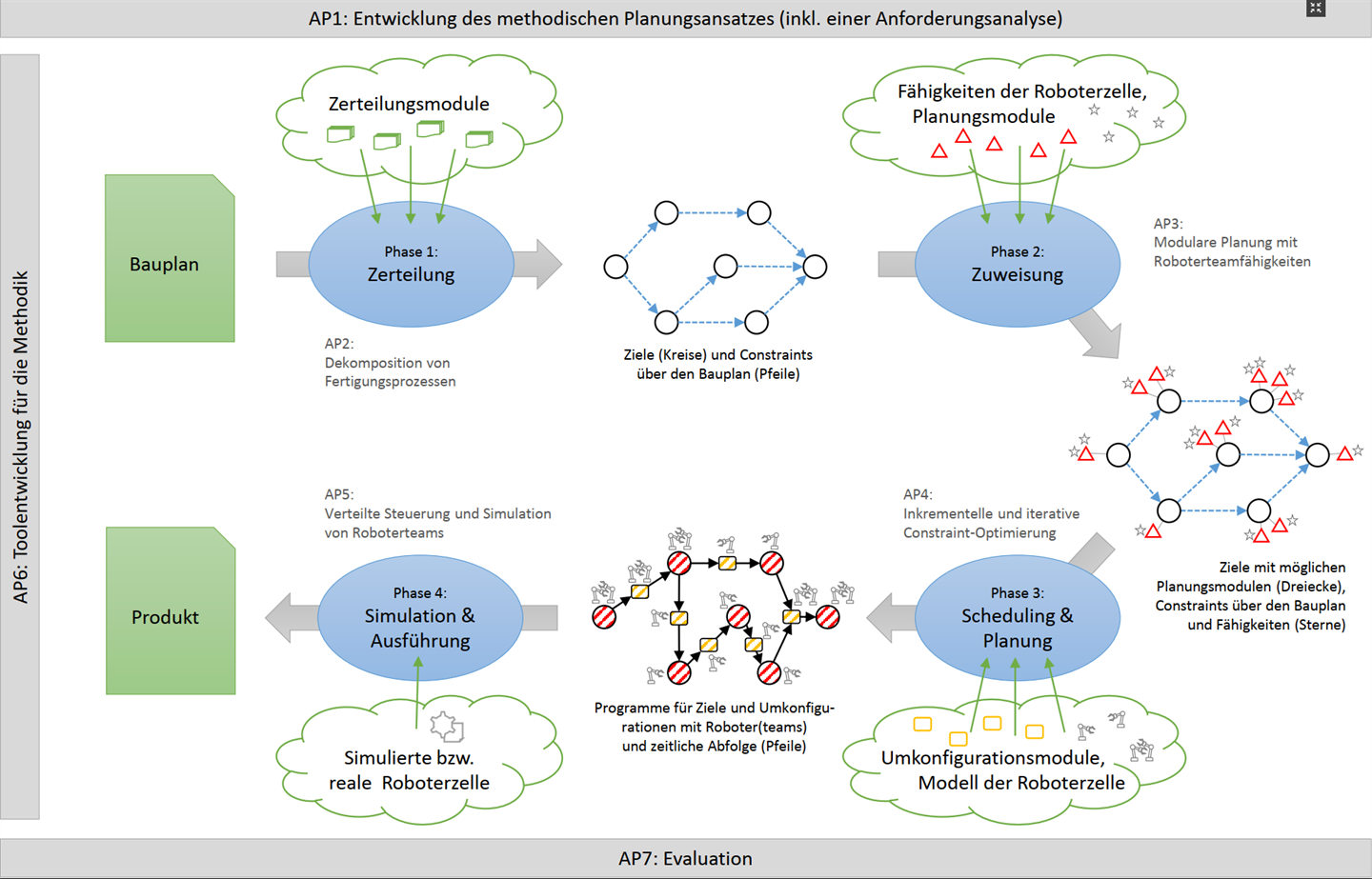
In diese Lücke zielt das Projekt TeamBots, das sich mit der Entwicklung von Steuerungskonzepten für Roboterteams in der Automatisierung beschäftigt und zwischen der Universität Augsburg und dem ZLP aufgeteilt ist. Der Anteil des Zentrums für Leichtbauproduktionstechnologie bezog sich dabei der Expertise entsprechend auf die oben beschriebene Thematik von Roboterteams in der CFK-Produktion. Ziel war es, aus einem Computermodell eines Bauteils Aktionen für Roboterteams zu generieren, und dabei einen möglichst hohen Grad an Automatisierung zu erreichen.
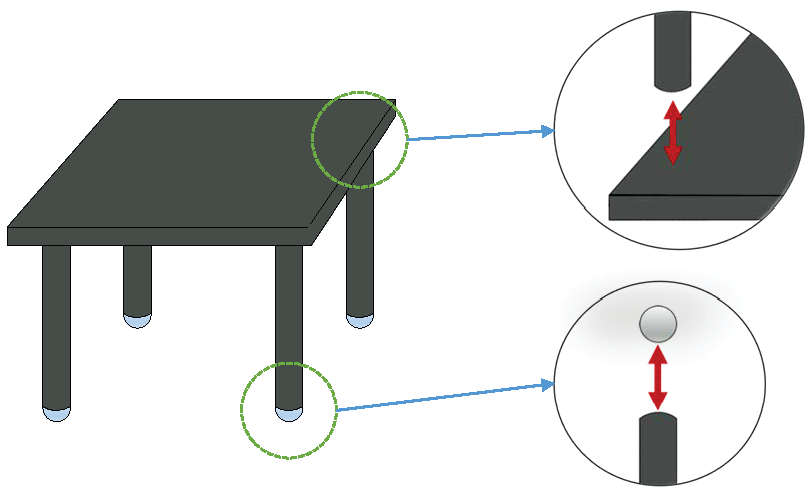
Das Computermodell besteht im Wesentlichen aus Informationen über die Kontur der Zuschnitte. Diese sind einmal flach auf einem Aufnahmetisch dargestellt als auch räumlich in der Form, in der sie später zu liegen kommen. Diese Informationen können verwendet werden, um Positionen zu bestimmen, an denen die Roboter mit Hilfe von speziellen Greifern die Zuschnitte aufheben und in der Form drapieren können. Ferner legt das Computermodell auch gewissen Beschränkungen fest, in welcher Reihenfolge die Zuschnitte in die Form gelegt werden müssen.
Aus diesen Informationen kann man nun mit Zusatzwissen über vorhandene Greifer einer Fertigungszelle und deren Fähigkeiten Zuordnungen bestimmen, die festlegen, welcher Roboter oder welches Roboterteam welche Zuschnitte verarbeiten kann. Darüber hinaus sind auch parallele Aktionen möglich, so kann zum Beispiel ein Roboter einen kleinen Zuschnitt in der Form ablegen, während ein anderer Roboter einen kleinen Zuschnitt vom Tisch aufnehmen kann. Diese möglichen Aktionen können unter der Berücksichtigung der Beschränkungen über die Ablegereihenfolge in Aktionen für die Roboter übersetzt werden. Eine Erprobung im der Realität ist am ZLP in einem anderen Projekt geplant; hier wurde der Vorgang in einem Modellierungstool (Blender) umgesetzt und in eine Videodatei gerendert.