So fern und doch so nah – Alexander Gerst steuert Roboter auf der Erde
17. August 2018 | ISS-Experiment METERON SUPVIS-Justin: Zukunft der Roboter-Mensch-Zusammenarbeit im All
So fern und doch so nah – Alexander Gerst steuert Roboter auf der Erde
Live-Robotik-Experiment zwischen ISS und Erde
Am 17. August 2018 wurde im DLR-Instiut für Robotik und Mechatronik in Oberpfaffenhofen das letzte Experiment des Projekts "METERON SUPVIS-Justin" erfolgreich durchgeführt, bei dem Mensch und Maschine Hand in Hand arbeiten: Von der ISS aus weisen Astronauten über einen Tablet-PC dem Roboter Rollin‘ Justin komplexe Explorationsaufgaben zu, die der humanoide „Arbeitskollege“ dann weitgehend selbstständig bewältigt – ein wichtiges KI-Experiment für kommende Weltraummissionen sowie die Industrieproduktion der Zukunft.
Alexander Gerst steuert DLR-Roboter Rollin' Justin
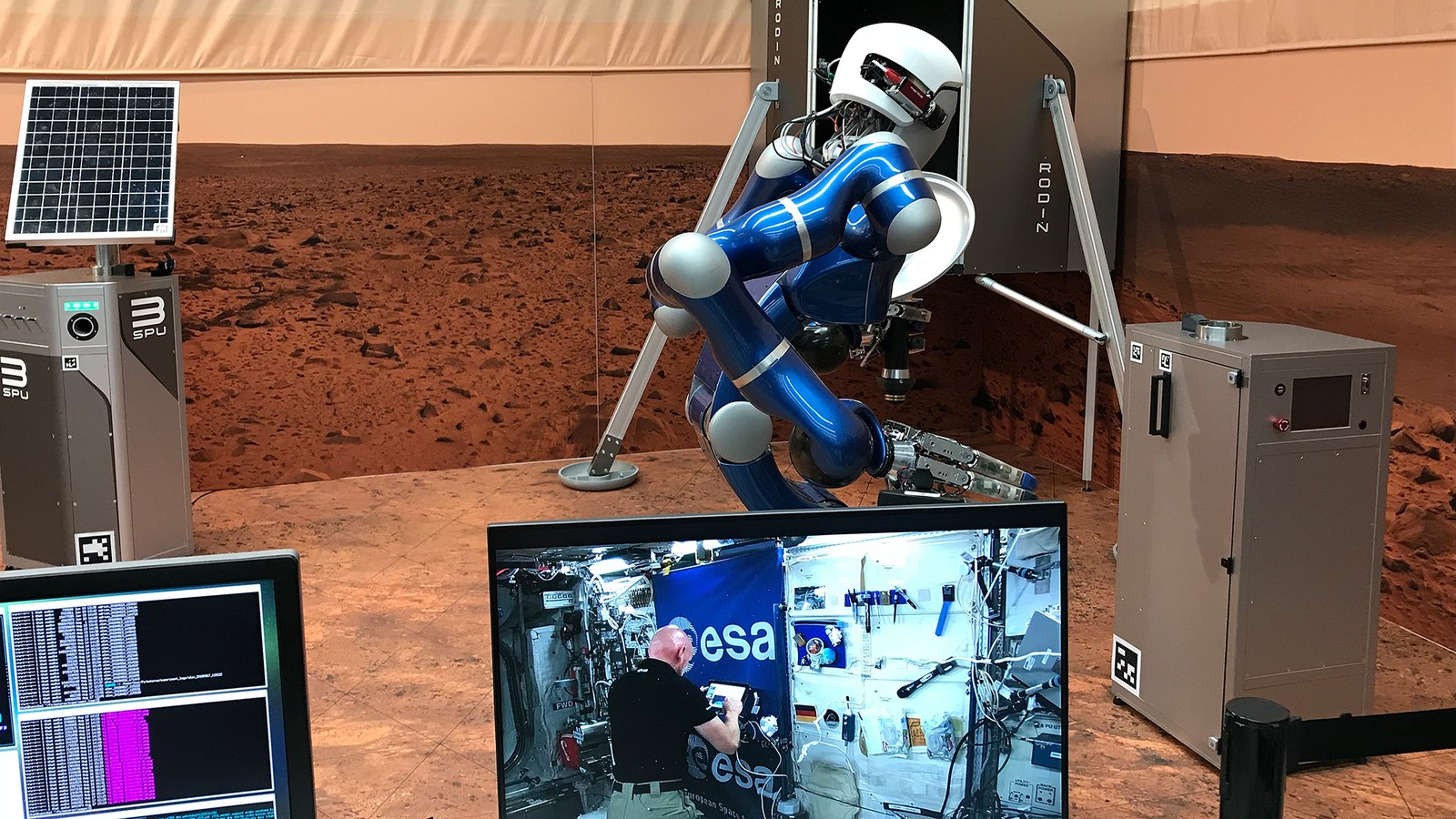
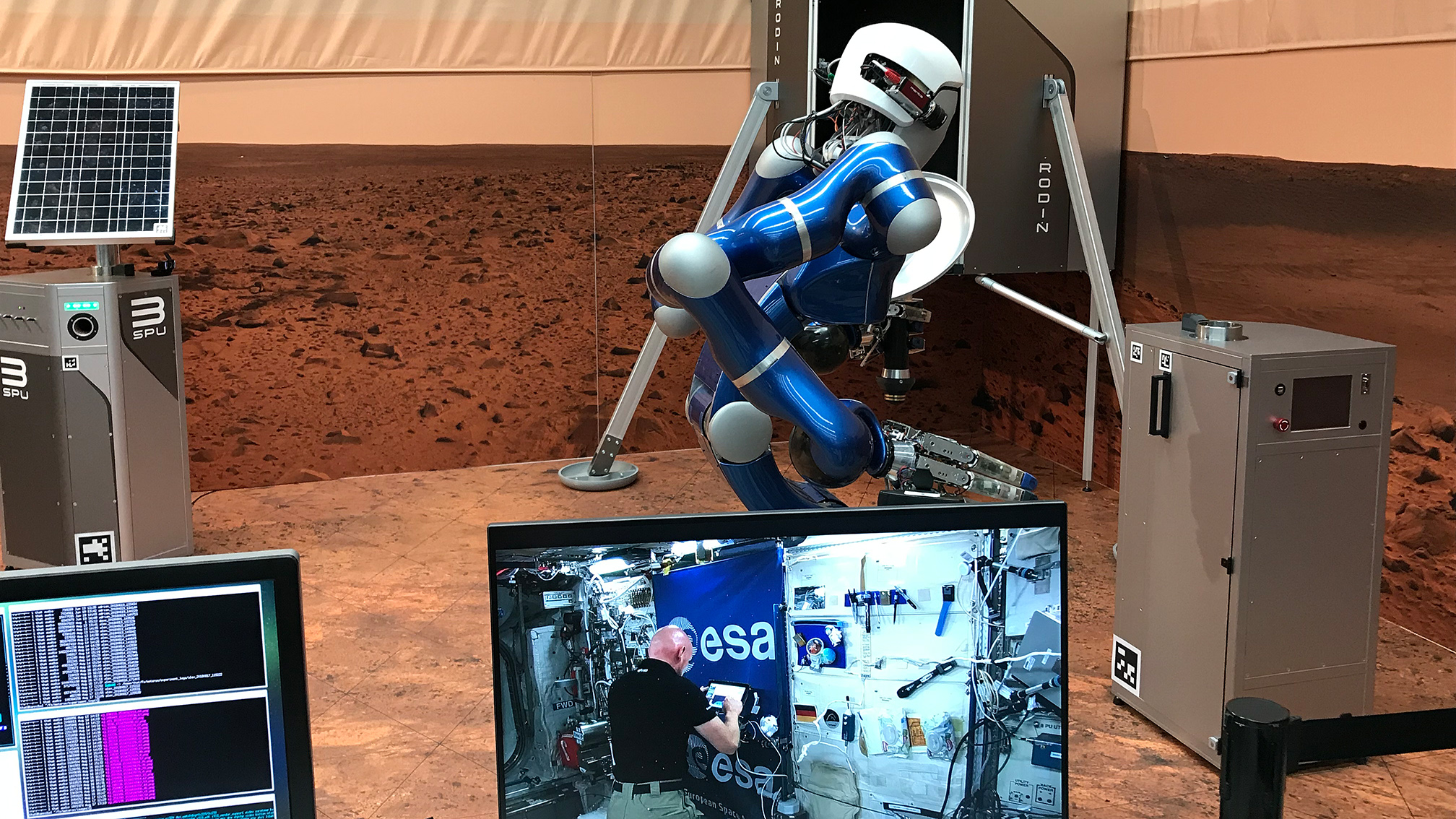
Perfekte Zusammenarbeit zwischen dem deutschen ESA-Astronaut Alexander Gerst an Bord der ISS und DLR-Roboter Rollin' Justin im Marslabor des DLR-Instituts für Robotik und Mechatronik: Die besondere Herausforderung bei diesem METERON SUPVIS-Justin Experiment lag in der hohen Eigenständigkeit des Astronauten und dem größeren Handlungsspektrum des robotischen Co-Workers.
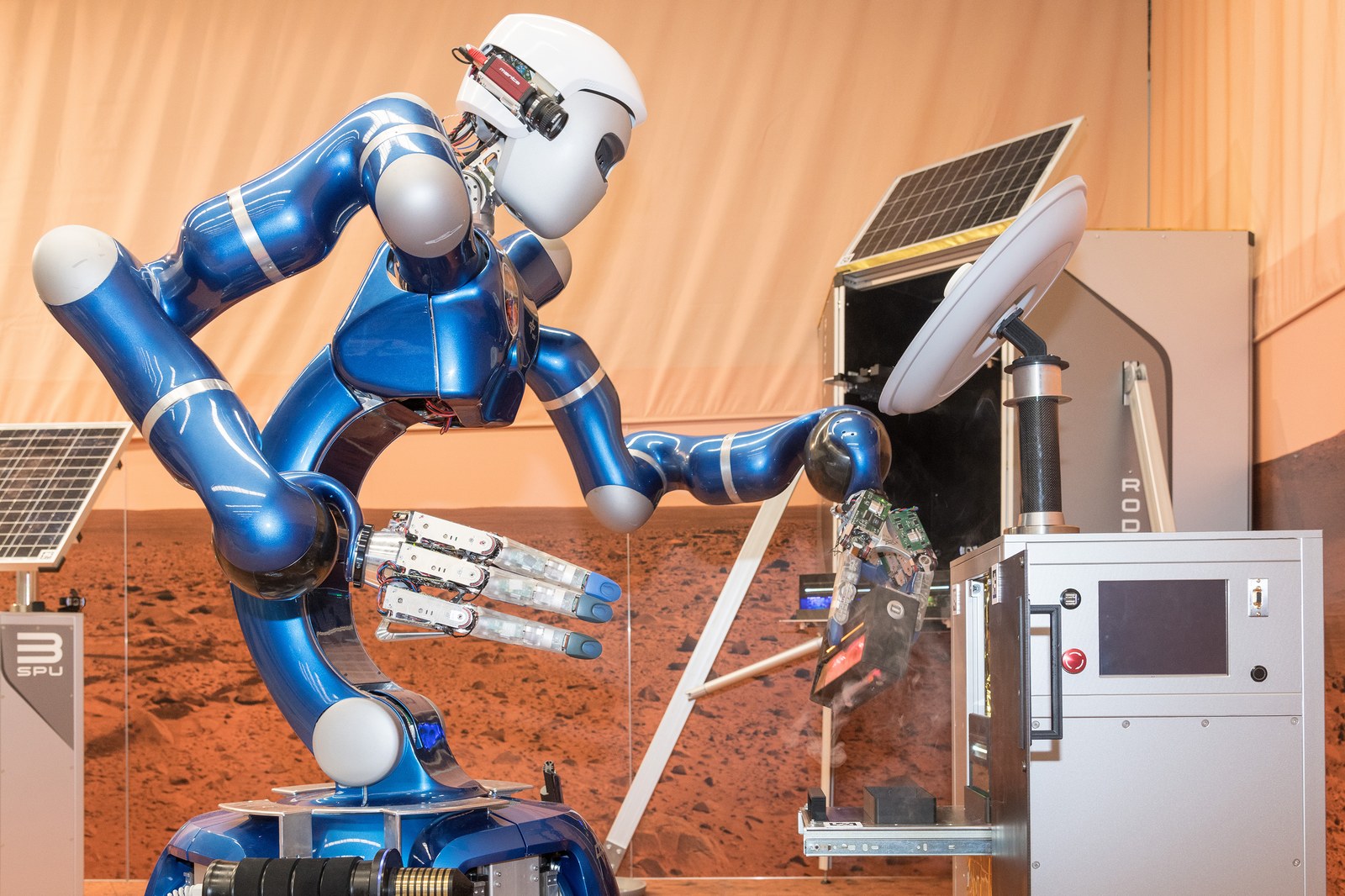
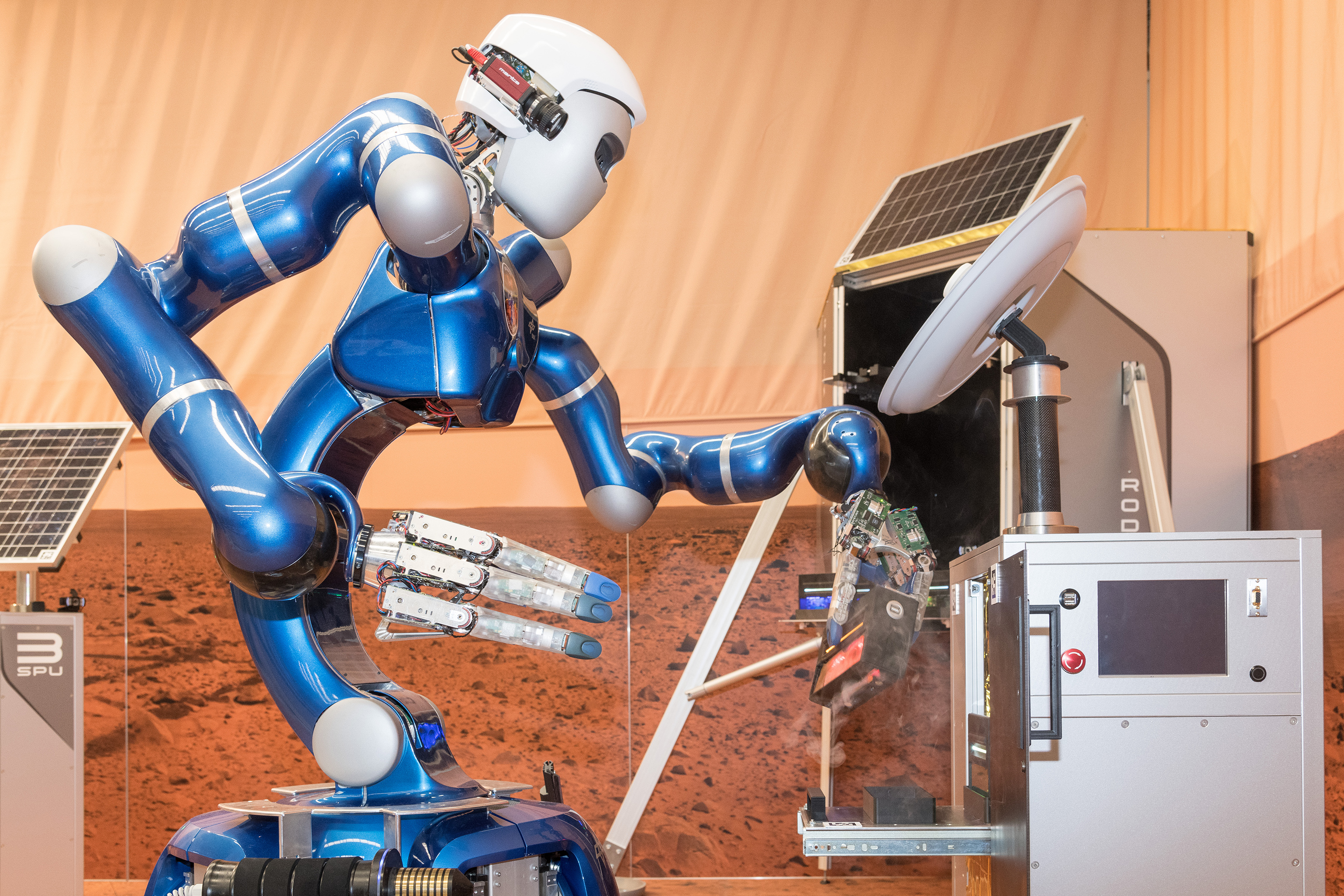
Die Simulation eines Ernstfalls war der kritischste Teil des Experiments am 17.August 2018 bei dem Alexander Gerst an Bord der ISS spontan auf einen unbekannten Defekt reagieren musste. An Bord der ISS konnte der deutsche ESA-Astronaut den humanoiden DLR-Roboter "Rollin‘ Justin" erfolgreich seine neue Aufgabe zuweisen - den Austausch eines durchgebrannten Moduls in der Satellitenempfangsanlage.
Am 17. August 2018 fand das letzte ISS-Telerobotik-Experiment METERON SUPVIS-Justin am DLR-Institut für Robotik und Mechatronik statt: Alexander Gerst steuert Roboter Rollin' Justin per Tablet-PC
Besonderheit des Experiments ist die hohe Eigenständigkeit des Astronauten und der größere Handlungsspektrum des robotischen Co-Workers
Alexander Gerst stutzt – Rauch steigt aus der Satellitenempfangsanlage, die er mithilfe seines robotischen Avatars gerade auf dem Mars aufbaut. Jetzt heißt es schnell und richtig handeln, für Mensch und Maschine… Die Simulation eines Ernstfalls ist der kritischste Teil des neuesten Telerobotik-Experiments am Deutschen Zentrum für Luft- und Raumfahrt (DLR), bei dem ein Astronaut an Bord der Internationalen Raumstation ISS den humanoiden Roboter "Rollin‘ Justin" in Oberpfaffenhofen per Tablet fernsteuert. Das letzte von insgesamt drei "METERON SUPVIS-Justin"-Experimenten fand am 17. August 2018 im Marslabor des DLR-Instituts für Robotik und Mechatronik statt, mit erfolgreicher Unterstützung des deutschen ESA-Astronauten Alexander Gerst im Rahmen seiner Mission "horizons".
Die Neuerung und besondere Herausforderung dieses Experiments liegt in der hohen Eigenständigkeit des Astronauten und dem größeren Handlungsspektrum des robotischen Co-Workers. So musste Alexander Gerst nicht nur die bisher komplexesten Telerobotik-Aufgaben im Weltraum meistern, sondern auch auf unerwartete Situationen reagieren.
"In der astronautischen Raumfahrt spielen intelligente Roboter zukünftig eine wichtige Rolle, insbesondere bei Explorationsaufgaben. Sie können die Arbeit des Menschen im Orbit und auf der Erde unterstützen, schwer zugängliche sowie risikoreiche Regionen erkunden", sagt Prof. Hansjörg Dittus, Vorstandsmitglied des DLR für Raumfahrtforschung und –technologie. "Darüber hinaus werden die Technologien und Ergebnisse des Experimentes METERON SUPVIS-Justin auch vielfältige Anwendungen auf der Erde ermöglichen. Das gilt insbesondere für Bereiche die eine zuverlässige und sichere Kooperation und Interaktion zwischen Mensch und Maschine verlangen, etwa in der Assistenz- und Pflegerobotik oder bei der industriellen Konstruktion und Wartung." Erst im Mai stellte das DLR-Institut für Robotik und Mechatronik sein Projekt SMiLEvor, das Roboter zur Pflegeunterstützung von Personen im Alter oder mit körperlichen Beeinträchtigungen entwickelt.
Grundlage für kommende Weltraummissionen
Die Steuerung von "Rollin‘ Justin" erfolgt intuitiv, d.h. Alexander Gerst bestimmt über das Tablet welche Arbeitsschritte der Roboter durchführen soll, aber nicht wie diese genau auszuführen sind. Der humanoide Roboter erledigt kontextbezogene elementare Aufgaben und trifft mithilfe seiner künstlichen Intelligenz die dazu notwendigen Entscheidungen. Im Rahmen der europäischen Experimentreihe METERON(Multi-Purpose End-to-End Robotic Operation Network) haben die Robotikexperten am DLR ihre Telerobotik-Technologien weiterentwickelt und realistische Szenarien zur Planetenexploration geschaffen. Damit ist der Nachweis geführt, dass robotische Co-Worker eine wertvolle und teilweise sogar notwendige Unterstützung für den Menschen sind und für eine große Bandbreite an Erkundungs-, Aufbau- und Wartungsarbeiten eingesetzt werden können.
"Unser Ziel ist es zu demonstrieren, dass robotische Co-Worker auf fernen Planeten oder dem Mond eingesetzt werden können. Sie können uns helfen, die erste Kolonie im Weltall aufzubauen. Die Bedienkonzepte und Technologien, die wir kontinuierlich dazu entwickeln, sollen die Grundlage für zukünftige robotische Welltraummissionen bilden", erklärt Projektleiter Dr. Neal Lii vom DLR-Institut für Robotik und Mechatronik.
Für ein möglichst realistisches Szenario waren Alexander Gerst und Rollin‘ Justin auf sich gestellt und führten ihren Auftrag weitgehend ohne Kontakt zur Bodencrew aus. Trotz der Einschränkungen konnte der deutsche ESA-Astronaut intuitiv mit seinem Roboterkollegen interagieren und selbst die komplexen Aufgaben erfolgreich steuern – von der Wartung einer Solaranlage bis zum Aufbau einer Empfangsstation. Höhepunkt des zweistündigen Live-Experiments war der erfolgreiche Austausch des plötzlich brennenden Stationsmoduls. So konnte das Team von METERON SUPVIS-Justin demonstrieren, dass intelligente Roboter den Menschen auch in unerwarteten Situationen in der Ferne unterstützen – wie ein "Arbeitskollege" vor Ort.
Über die Missionen
Der deutsche ESA-Astronaut Dr. Alexander Gerst startete am 6. Juni 2018 zur Internationalen Raumstation ISS für seine zweite Langzeitmission: "Alexander Gerst Blog". Bis zu seiner Rückkehr im Dezember 2018 wird Gerst an insgesamt 67 europäischen Experimenten arbeiten, davon stammen 41 aus Deutschland. Sie sollen zu Lösungen für die globalen gesellschaftlichen Herausforderungen wie Gesundheit, Umwelt und Klimawandel sowie Digitalisierung, Industrie 4.0, Energie und Mobilität von Morgen beitragen.
Das METERON SUPVIS-Justin Experiment ist eine Kooperation zwischen dem DLR und der Europäischen Weltraumorganisation ESA - European Space Agency. Für den Einsatz der neuen Telerobotik-Technologien dient die ISS und das Columbus-Modul als ideale Testumgebung. Unterstützt wurden die Aktivitäten vom Columbus-Kontrollzentrum, das zum Deutschen Raumfahrtkontrollzentrum (GSOC)am DLR-Standort in Oberpfaffenhofen gehört. Das Columbus-Kontrollzentrumist für den Betrieb des ISS-Weltraumlabors verantwortlich und seit zehn Jahren rund um die Uhr im Einsatz. Insgesamt betreuen rund 80 Mitarbeiter am GSOC die europäischen Forschungsarbeiten auf der ISS.
Das gesamte Experiment im Livestream-Replay:
ESA Astronaut Dr. Alexander "Astro-Alex" Gerst steuert im Rahmen der dritten ISS Crew Session des METERON SUPVIS Justin Experiments den humanoiden Roboter "Rollin' Justin" live von der Internationalen Raumstation (ISS). Der Roboter befindet sich in einer simulierten Marsumgebung im Robotik und Mechatronik Zentrum des DLR, Oberpfaffenhofen. In dieser ISS Crew Session kommandiert Dr. Gerst Justin in mehreren Aufgaben, die zu den komplexesten telerobotischen Aufgaben gehören, die je vom Orbit aus ausgeführt wurden. Dazu gehört die Reparatur und Installation von Hardware mit bisher ungekannter robotischer Fingerfertigkeit. Unser Ziel ist es zu zeigen, dass es machbar ist, robotische "Kollegen" auf dem Mond oder weiter entfernten Himmelskörpern einzusetzen um mit ihrer Hilfe die erste Weltraumkolonie oder das erste Weltraumhabitat zu errichten. Das Projekt wurde durch das Robotik und Mechatronik Zentrum des DLR zusammen mit ESAs Human Robot Interaction Lab initiiert. Weitere Partner sind das Deutsche Raumfahrtkontrollzentrum, das Europäische Astronautenzentrum, die Danish Aerospace Company, Airbus und die NASA.
METERON SUPVIS Justin experiment with Alexander Gerst
Für die Wiedergabe dieses Videos auf Youtube.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
METERON SUPVIS Justin experiment with Alexander Gerst
ESA Astronaut Dr. Alexander "Astro-Alex" Gerst steuert im Rahmen der dritten ISS Crew Session des METERON SUPVIS Justin Experiments den humanoiden Roboter "Rollin' Justin" live von der Internationalen Raumstation (ISS). Der Roboter befindet sich in einer simulierten Marsumgebung im Robotik und Mechatronik Zentrum des DLR, Oberpfaffenhofen. In dieser ISS Crew Session kommandiert Dr. Gerst Justin in mehreren Aufgaben, die zu den komplexesten telerobotischen Aufgaben gehören, die je vom Orbit aus ausgeführt wurden. Dazu gehört die Reparatur und Installation von Hardware mit bisher ungekannter robotischer Fingerfertigkeit. Unser Ziel ist es zu zeigen, dass es machbar ist, robotische "Kollegen" auf dem Mond oder weiter entfernten Himmelskörpern einzusetzen um mit ihrer Hilfe die erste Weltraumkolonie oder das erste Weltraumhabitat zu errichten. Das Projekt wurde durch das Robotik und Mechatronik Zentrum des DLR zusammen mit ESAs Human Robot Interaction Lab initiiert. Weitere Partner sind das Deutsche Raumfahrtkontrollzentrum, das Europäische Astronautenzentrum, die Danish Aerospace Company, Airbus und die NASA.


{kind=link}
{kind=link}
{kind=link}
