Mit Roboterschwärmen auf Erkundung in unserem Sonnensystem
22. Oktober 2018
Mit Roboterschwärmen auf Erkundung in unserem Sonnensystem
Die Kollegen aus dem Institut für Kommunikation und Navigation
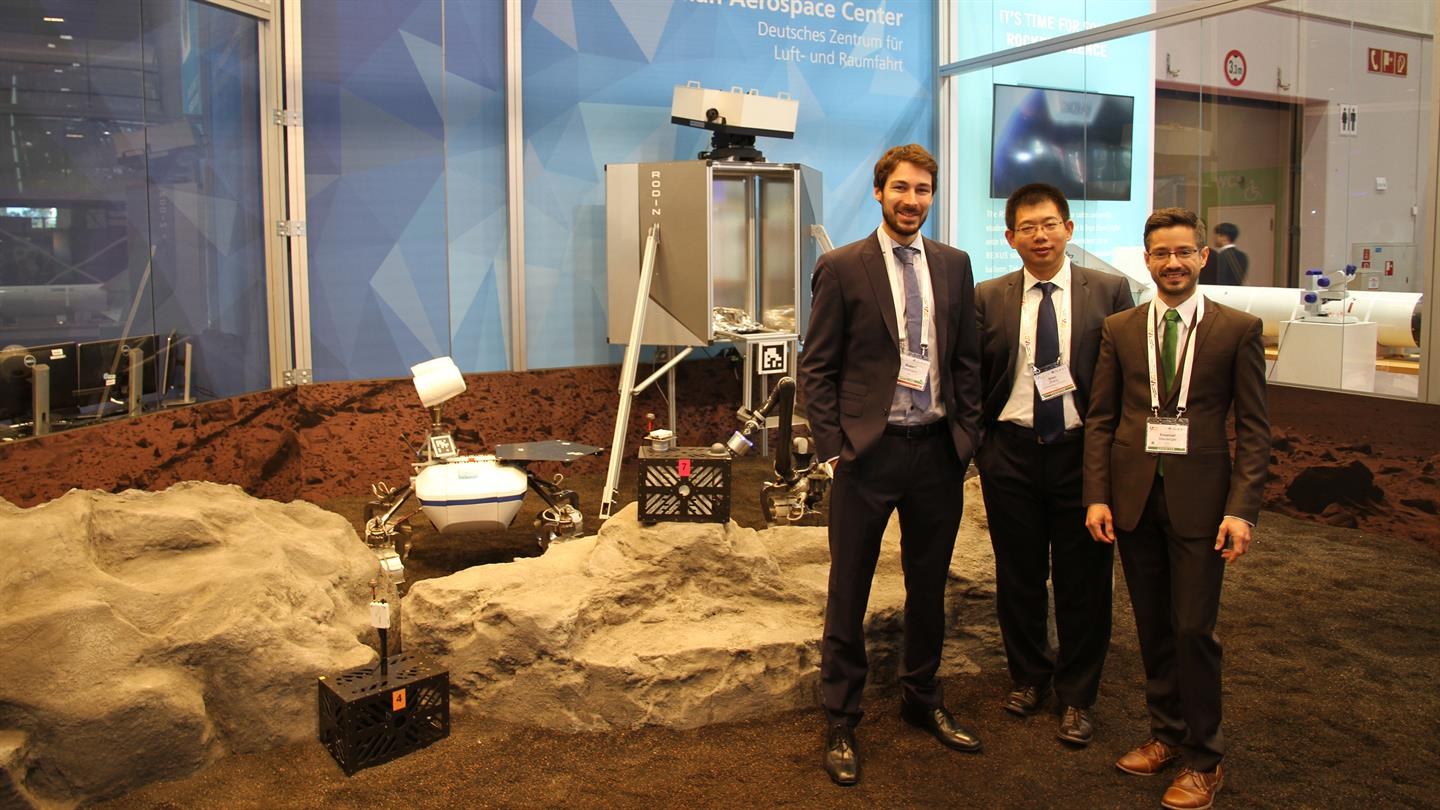
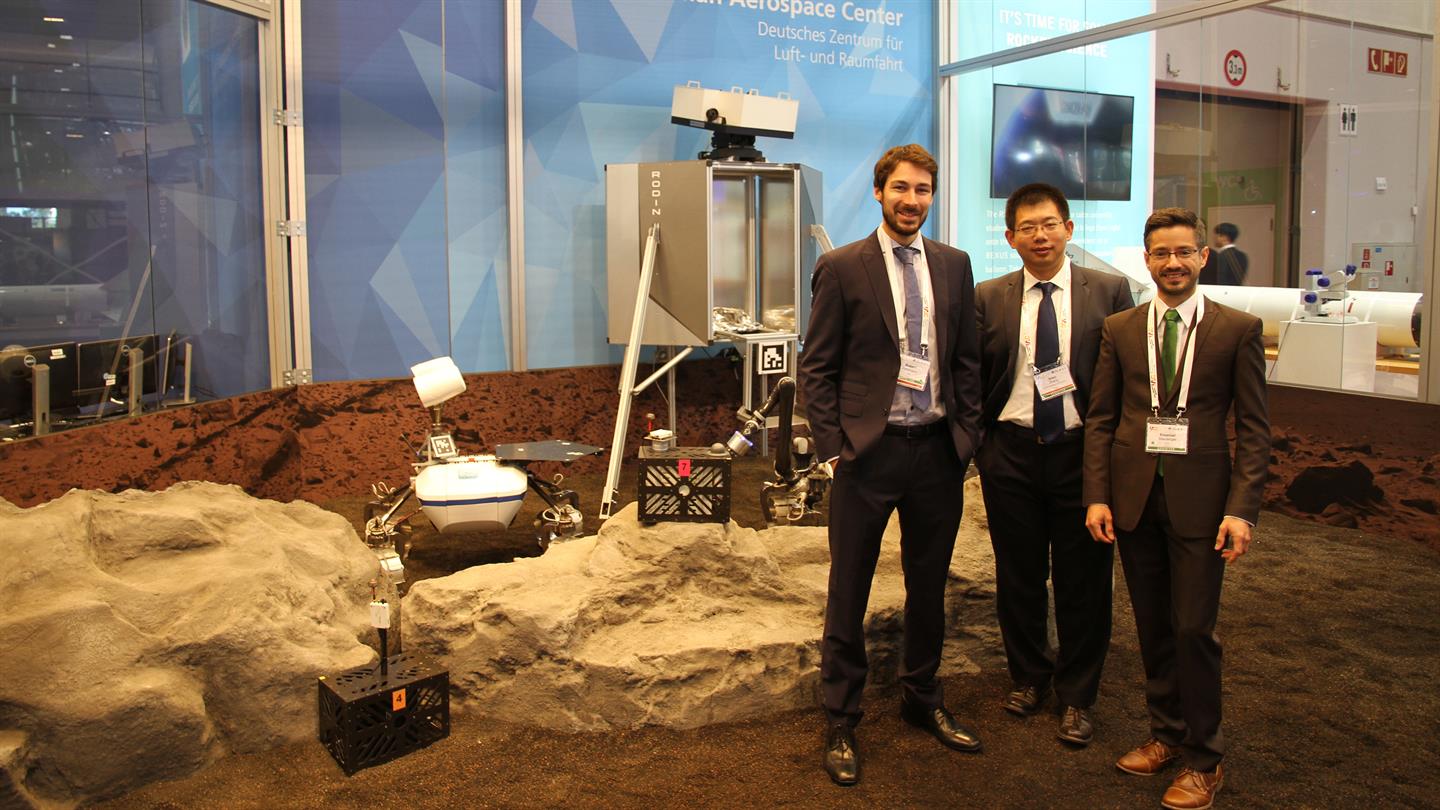
Sieht es auf fremden Monden und Planeten tatsächlich aus wie auf dem DLR-Stand auf dem Internationalen Weltraumkongress IAC? Die Kollegen aus dem Institut für Kommunikation und Navigation schicken hierfür schon bald ganze Schwärme von Rovern und Drohnen in ferne Welten.
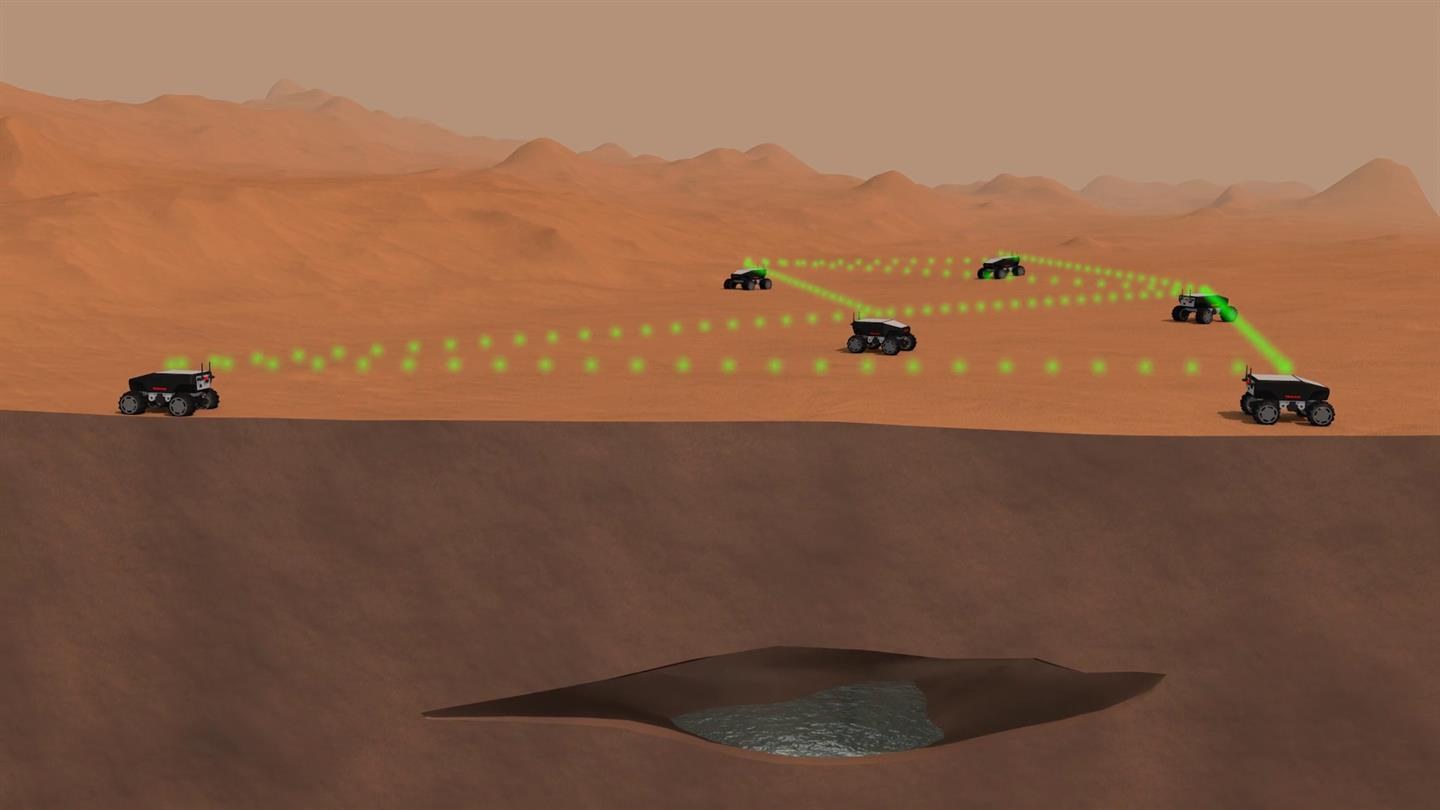
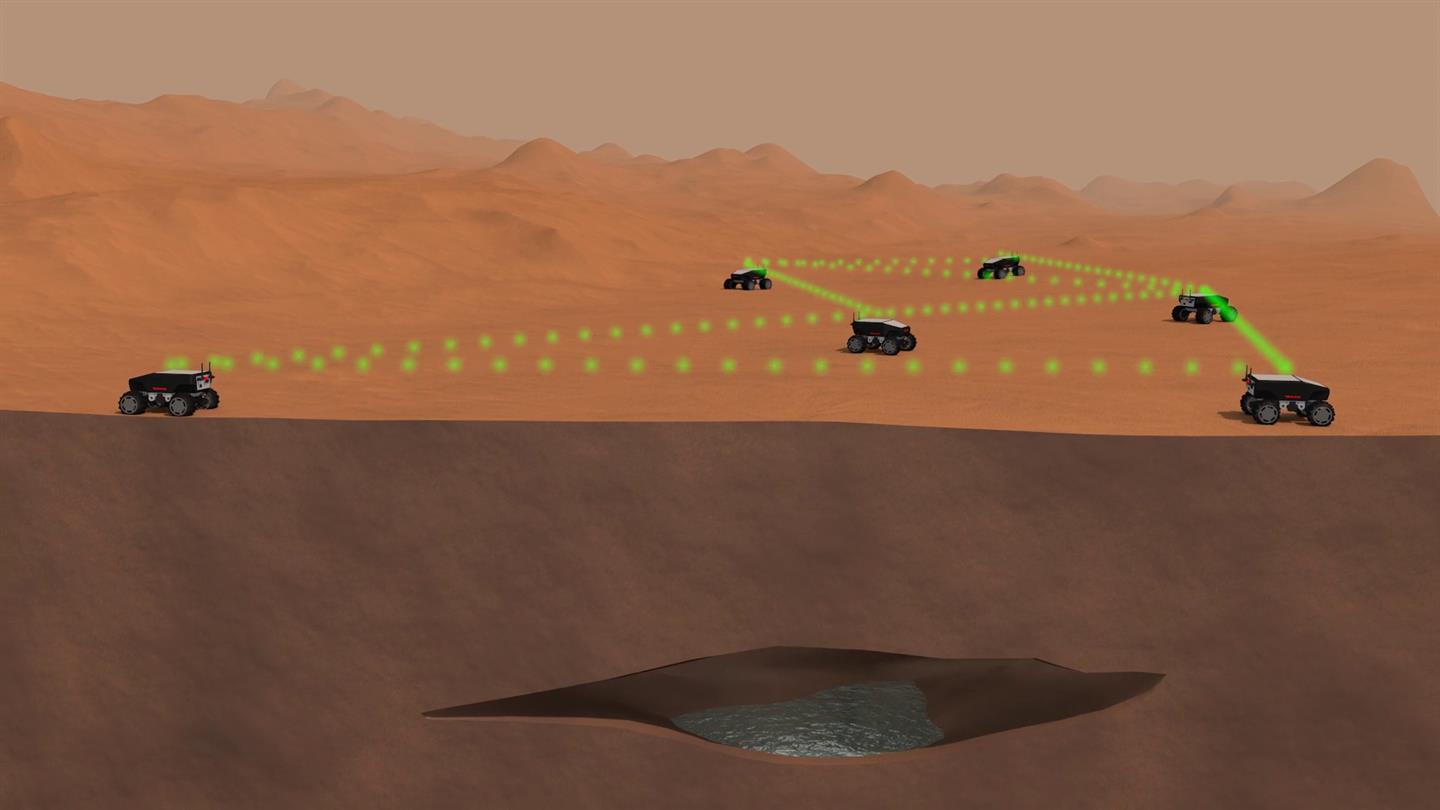
In der Abschlussveranstaltung des vom DLR-Raumfahrtmanagement geförderten Projekts VaMEx -CoSMiC (Valles Marineris Explorer - Cooperative Swarm Navigation, Mission and Control) demonstrierte das DLR, dass Schwärme in der Lage sind, ein neues Kapitel in der Raumfahrt zu schreiben. Statt mit nur einem Roboter sollen ferne Welten künftig mit einem Schwarm von autonomen Rovern oder Drohnen erkundet werden. Das DLR bereitet am Institut für Kommunikation und Navigation seit mehreren Jahren diesen neuen Ansatz zur Exploration auf Monden und Planeten unseres Sonnensystems vor.
"Schwärme haben große Vorteile gegenüber einzelnen Plattformen: Erhöhte Robustheit der Mission gegenüber dem Ausfall einzelner Schwarmelemente, gleichzeitige Beobachtung physikalischer Phänomene von verschiedenen Orten, größere Beobachtungsaperturen und deutlich schnellere Exploration als ein einzelner Rover", betont Prof. Uwe-Carsten Fiebig, Abteilungsleiter der Abteilung Nachrichtensysteme des DLR-Instituts für Kommunikation und Navigation. Allerdings kann man einen Schwarm von der Erde aus nicht mehr per Hand steuern: Er muss autonom agieren und selbstständig Entscheidungen treffen, auf welche Weise er ein unbekanntes Gebiet erforscht.
Die Wissenschaftler des DLR entwickeln die zentralen Bausteine, um die Schwarmexploration zu ermöglichen: Kommunikationsverfahren, damit die Schwarmelemente untereinander Messwerte austauschen und sich gegenseitig abstimmen können, Synchronisationsverfahren, damit Elemente eines Schwarms gleichzeitig Messungen durchführen können, Funk-Navigationstechniken - die sogenannte Schwarmnavigation - zur Lokalisierung und Schwarmsteuerung von einzelnen Elementen. Das soll verhindern, dass sie kollidieren oder zu weit auseinander driften. Letztendlich werden dadurch Explorationsverfahren entwickelt, um ein unbekanntes Gebiet autonom in möglichst kurzer Zeit optimal erkunden zu können.
Das Oberpfaffenhofener Institut zeigte auf der Abschlussveranstaltung des Projekts VaMEx _CoSMiC, dass die entwickelte Schwarmnavigation mit großer Präzision funktioniert und demonstrierte exemplarisch, dass ein Schwarm unbekannte Gasquellen - zum Beispiel Methan autonom und in kürzester Zeit findet. Nur wenige Wochen später begeisterte das Team auch die Besucher des Internationalen Astronautischen Kongress (IAC‘2018 ) in Bremen, dem weltweit größten Raumfahrtkongress, und demonstrierte zusammen mit Wissenschaftlern aus dem DLR-Institut für Robotik und Mechatronik das Konzept der Schwarmnavigation. Weitere Anwendungen für Schwärme sind zum Beispiel seismische Experimente, die Exploration von Höhlen und die Suche nach Wasser und Leben. Auch die amerikanische Weltraumbehörde NASA setzt neuerdings auf Schwarmsysteme, wie sie auf dem IAC in einem vom DLR-Institut für Kommunikation und Navigation organisierten Sonderworkshop bekannt gab. So will sie beispielsweise im Weltraum ein großes Teleskop aus einem Schwarm kleiner Einzelelemente bilden und den Mars mit einem Schwarm von Helikoptern erkunden.

{kind=link}
{kind=link}