Der Marsmaulwurf und der herausfordernde Boden des Roten Planeten
{kind=link}
Für die Wiedergabe dieses Videos auf Quickchannel.com ist Ihre Zustimmung zur Speicherung von Daten ('Cookies') erforderlich. Unter Datenschutz-Einstellungen können Sie Ihre Wahl einsehen und verändern.
NASA/JPL-Caltech

{kind=link}
- HP3/InSight-Missionsteam beantwortet häufig gestellte Fragen.
- Schwerpunkte: Raumfahrt, Exploration
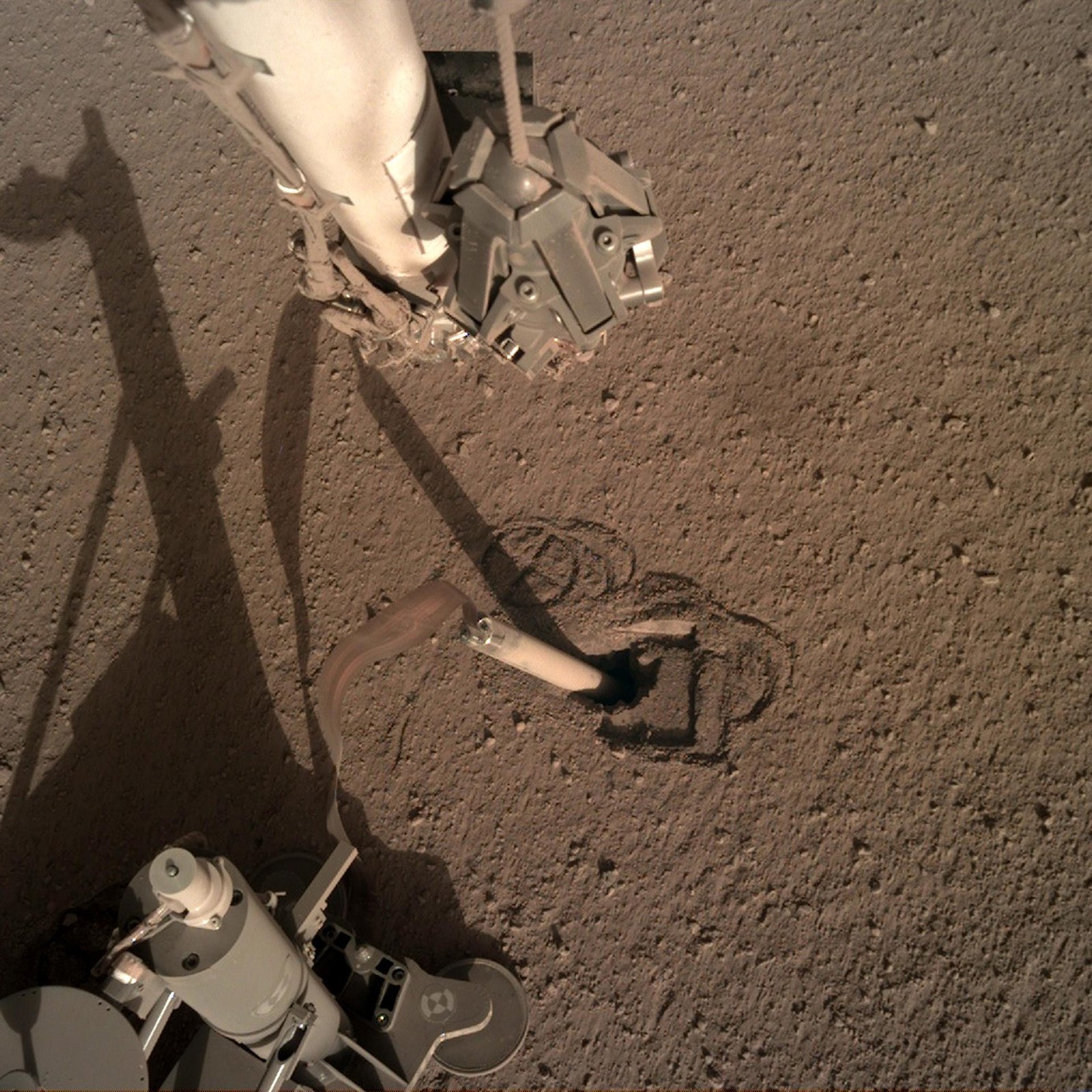
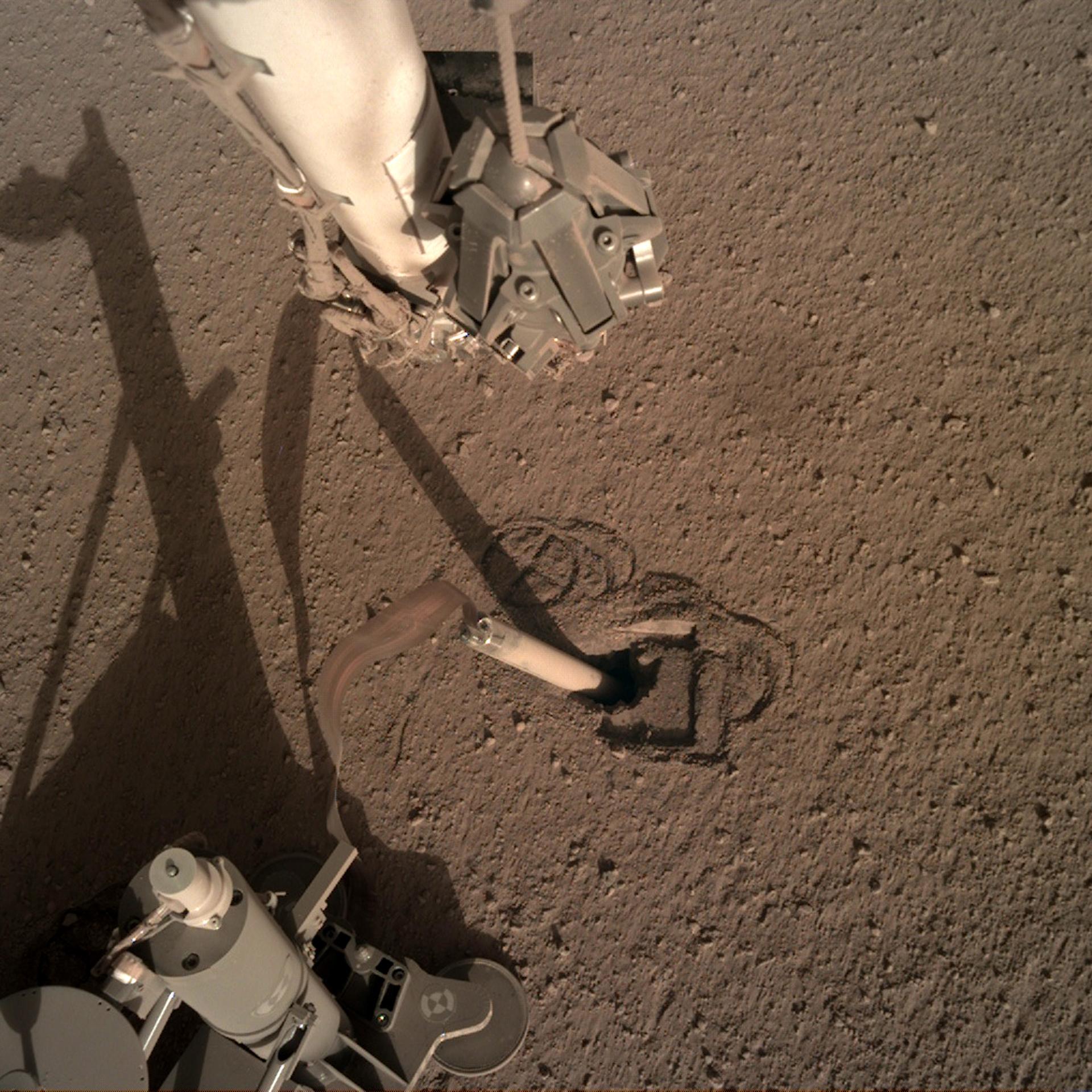
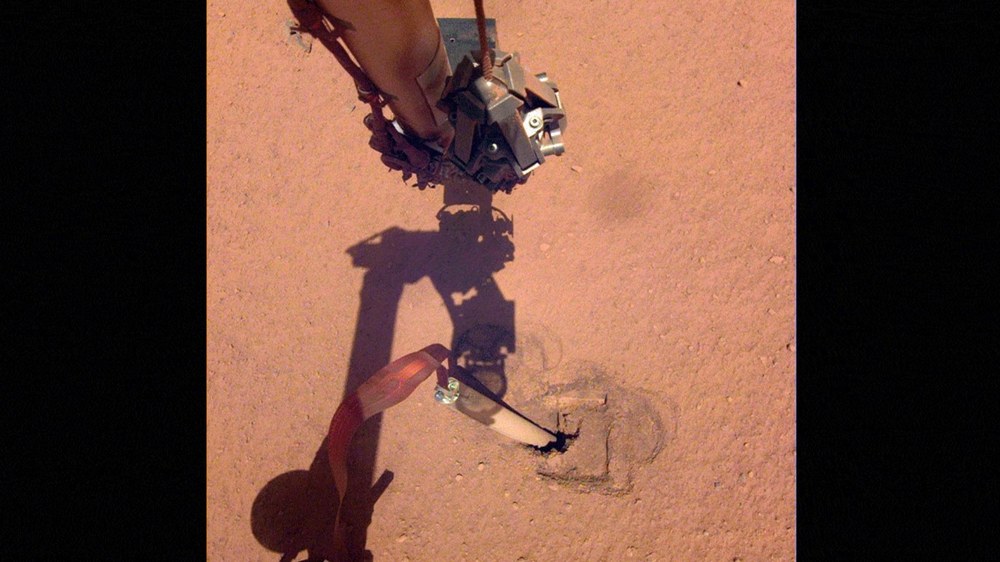
Im November 2018 ist die Mission InSight der NASA auf dem Mars gelandet. Das Deutsche Zentrum für Luft- und Raumfahrt (DLR) ist mit dem Experiment HP³ (Heat Flow and Physical Properties Package) beteiligt. Kernbestandteil des Experiments ist neben einem Radiometer zur Oberflächentemperaturmessung der Marsmaulwurf - eine 40 Zentimeter lange Rammsonde, die in mehreren Metern Tiefe den Wärmefluss aus dem Marsinneren messen soll. Im Februar 2019 begann der Marsmaulwurf zu hämmern, blieb zunächst stecken und konnte Anfang Oktober 2019 mit helfendem Halt durch InSights Roboterarm fast vollständig in den Marsboden eindringen. Danach setzte der Marsmaulwurf ohne zusätzlichen Halt durch die Schaufel des Arms zu einer überraschend schnellen Rückwärtsbewegung an, wodurch er zuletzt knapp zur Hälfte aus dem Marsboden, dem Regolith herauskam.
Anvisiert ist, mit erneuter Hilfe des robotischen Arms den Marsmaulwurf wieder tiefer in den Boden zu bringen. Dafür sind erneut eine ausführliche Planung und vorausgehende Checks und Tests auf der Erde erforderlich. Nachfolgend beantwortet das HP³/InSight-Missionsteam häufige Fragen zum Marsmaulwurf und zur aktuellen Situation.
Warum kann der Marsmaulwurf nicht angehoben und an einen anderen Ort gesetzt werden?
Der Maulwurf ist so konzipiert, dass er für den Transport innerhalb der Tragekonstruktion untergebracht ist und sich mit dem beginnenden Hämmern aus dieser nach unten in den Boden hineinarbeitet. Der Maulwurf selbst hat keinen Greifpunkt und wurde nicht zum Greifen oder Umsetzen konzipiert. Selbst wenn der Maulwurf bewegt werden könnte, wäre das Versetzen eine wenig versprechende Lösungsstrategie. Das Team geht davon aus, dass die Sonde bisher nicht tiefer graben konnte, weil der Boden nicht genügend seitlichen Halt durch Reibung bietet. Rundherum um den Lander würde der Maulwurf wahrscheinlich das gleiche Problem mit der Bodenbeschaffenheit haben. Die Strategie des "Pinning" - des Drückens der Schaufel des Roboterarms gegen die Seite des Maulwurfs - gleicht diesen Mangel an Reibung aus und half dem Maulwurf Anfang Oktober, sich nach unten zu bewegen.
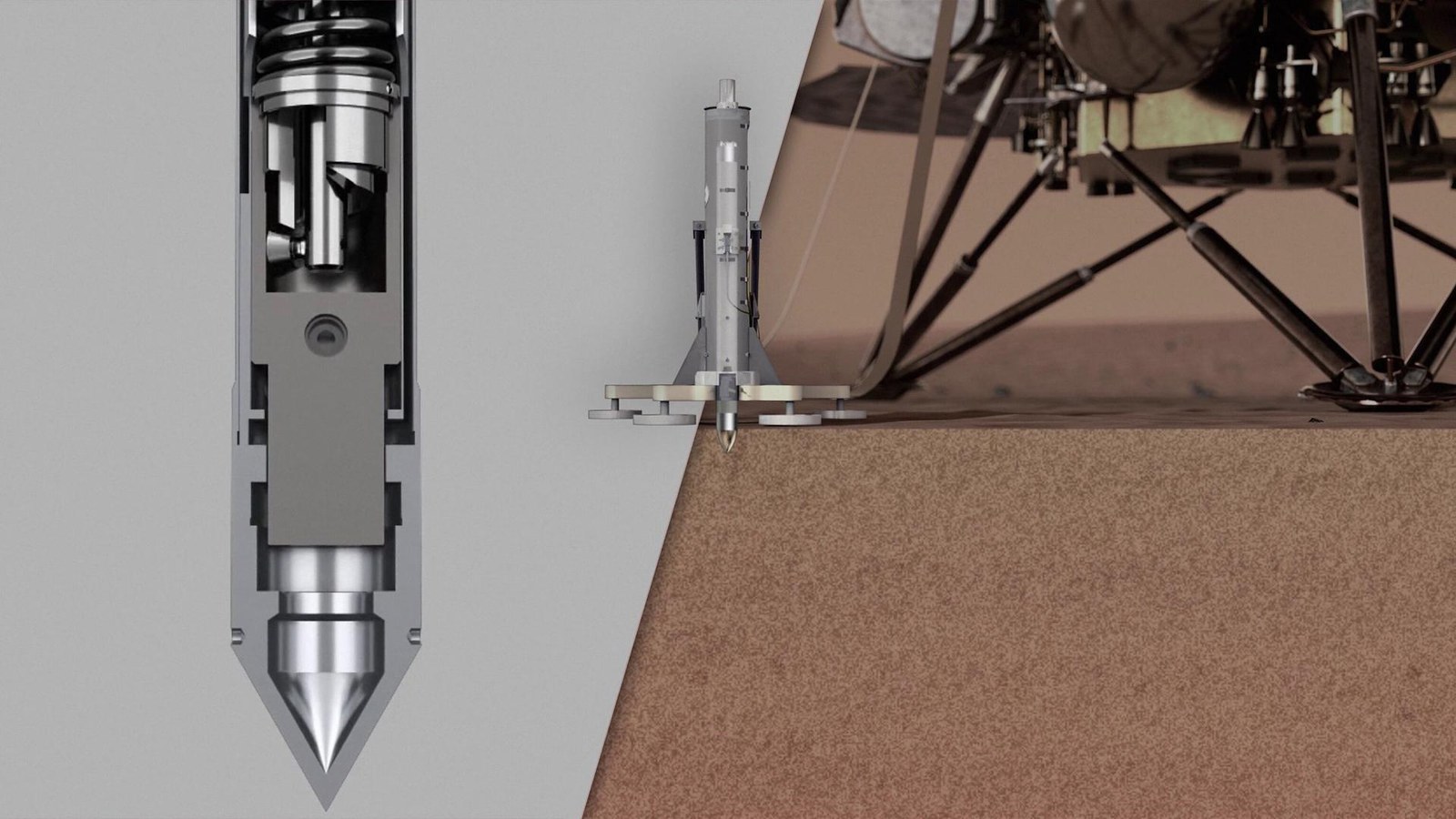
Warum verfügt der Maulwurf über keinen Bohrer?
Ein Bohrer würde einen viel größeren, leistungsfähigeren Motor erfordern, als der InSight-Lander hätte aufnehmen können. Dieser würde auch deutlich mehr Strom benötigen, als der solarbetriebene Lander bereitstellen kann. Ein Bohrer müsste auch umfangreicher in einen zusätzlichen Platz und Gewicht erfordernden Aufbau eingebettet werden, um ihn beim Drehen des Motors zu stabilisieren, genau wie bei einer Bohrmaschine. Solch ein aufwendigeres Gehäuse fängt die Kraft eines rotierenden Bohrers auf, der sonst den Motor in die andere Richtung drehen würde. Der Marsmaulwurf wurde dagegen mit etwa 2,7 Zentimetern im Durchmesser und 40 Zentimetern Länge so konstruiert, dass er leicht genug und klein genug ist, um den Einschränkungen des Landerdecks gerecht zu werden. Der Maulwurf funktioniert ähnlich wie eine Ramme: Ein Motor, der an einem Getriebe in seinem Inneren befestigt ist, komprimiert erst langsam und löst dann schnell eine Feder, die einen Wolframhammer gegen das Innere der Maulwurfspitze treibt, im Takt von einem Hub alle 3,7 Sekunden. Es ist ein gutes Design für die beschränkten Rahmenbedingungen der Mission.
Ist es sicher, dass der Maulwurf nicht auf einen Stein getroffen ist?
Das Team ist weiterhin zuversichtlich, dass der Marsmaulwurf nicht an einem Stein abgeprallt ist. Der Landeplatz Elysium Planitia wurde unter anderem ausgewählt, weil er so wenige sichtbare Steine an der Oberfläche hat, was auf ebenfalls wenige unterirdische Steine hindeutet. Der Maulwurf ist stark genug, um kleine Brocken aus dem Weg zu räumen, und er wurde entwickelt, um mittelgroße Brocken - mit einem Durchmesser von weniger als 10 Zentimetern - zu umgehen, sobald er vollständig eingegraben ist. Weitere Analysen sind erforderlich, um genauer zu begründen, warum der Marsmaulwurf sich aus dem Loch rückwärts herausgearbeitet hat, nachdem er zu tief im Marsboden war, um noch Hilfe von der Schaufel des robotischen Arms zu erhalten.
Wie schwierig macht es die reduzierte Schwerkraft auf dem Mars das Verhalten des Maulwurfs auf der Erde zu reproduzieren?
Das Roboterarm-Testfeld im Jet Propulsion Laboratory der NASA in Kalifornien nutzt Gewichtsmodelle (nicht-funktionale Nachbildungen der Instrumente, die das Gewicht haben, das sie auf dem Mars hätten), um die Auswirkungen der niedrigeren Schwerkraft des Roten Planeten zu simulieren. Aber bestimmte Experimente, wie z.B. das Graben des Maulwurfs, können nicht vollständig nachgebildet werden: Das Team kann keine niedrigere Schwerkraft an der Erdoberfläche simulieren. Es wäre nicht möglich, eine leichtere Version des Maulwurfs für Tests zu erstellen, die die gleiche Schlagkraft hat wie der Maulwurf auf dem Mars. Die Verhältnisse können nur in Computersimulationen nachgebildet werden, soweit die Bodeneigenschaften auf dem Mars bekannt sind.
Besteht die Möglichkeit, dass der Schlagwerksmechanismus des Maulwurfs beschädigt wurde?
Das Missionsteam hat keinen nennenswerten Unterschied zwischen der Leistung des Maulwurfs auf dem Mars und dem, was bei Tests auf der Erde beobachtet wurde, gesehen. Das Seismometer von InSight kann die Vibrationen jedes Hammerschlags des Maulwurfs erkennen und wird genutzt, um winzige (Millisekunden-)Variationen eines Schlags auf Anzeichen von Problemen zu analysieren. Bis heute hat das Team keine Hinweise darauf gefunden, dass der Schlagwerksmechanismus beschädigt ist.
Lehrt uns der Boden etwas Neues über den Mars mit den Herausforderungen, die er für den Marsmaulwurf bereithält?
Auf jeden Fall! Der Maulwurf wurde entsprechend der losen, sandigen Böden entworfen, die die Mars-Rover Spirit und Opportunity zeigten. Der Boden unter InSight unterscheidet sich mechanisch von dem, was an anderen Landeplätzen auf dem Mars beobachtet wurde. Die Bildung der Grube um den Maulwurf herum, die Widerstandsfähigkeit der Grube nicht zu kollabieren und die sehr interessante Selbstextraktion des Maulwurfs sind überraschend und werden vom Missionsteam untersucht, um das Verständnis von der Entstehung und den Variationen des Marsbodens zu überprüfen.
Warum wird nur seitlich auf den Marsmaulwurf gedrückt anstatt direkt von oben Druck auszuüben?
Die Technik des seitlichen Einklemmens ermöglichte es dem Marsmaulwurf Anfang Oktober 2019 fast vollständig in den Boden einzudringen, also ist es ein Vorgehen, das gut funktioniert solange der Maulwurf nicht vollständig im Boden ist. Das Missionsteam möchte möglichst vermeiden, oben auf die Rammsonde zu drücken, da dort ein empfindliches Kabel herausragt, das Strom für den Hammermechanismus liefert und Messdaten zur Muttersonde überträgt. Es ist immer noch möglich, dass das Team später entscheidet, auf die Oberseite des Maulwurfs zu drücken, wenn es keine anderen Optionen mehr gibt. Aber bisher wurde ausschließlich von der Seite gedrückt, weil es für die gesamte Hardware, einschließlich des InSight-Roboterarms sicherer ist.
Das HP³-Instrument auf der NASA-Mission InSight
Die Mission InSight wird vom Jet Propulsion Laboratory (JPL) in Pasadena, Kalifornien, im Auftrag des Wissenschaftsdirektorats der NASA durchgeführt. InSight ist eine Mission des NASA-Discovery-Programms. Das DLR steuert zur Mission das Experiment HP³ (Heat Flow and Physical Properties Package) bei. Die wissenschaftliche Leitung liegt beim DLR-Institut für Planetenforschung, welches das Experiment federführend in Zusammenarbeit mit den DLR-Instituten für Raumfahrtsysteme, Optische Sensorsysteme, Raumflugbetrieb und Astronautentraining, Faserverbundleichtbau und Adaptronik, Systemdynamik und Regelungstechnik sowie Robotik und Mechatronik entwickelt und realisiert hat. Daneben sind beteiligte industrielle Partner: Astronika und CBK Space Research Centre, Magson und Sonaca, das Institut für Photonische Technologie (IPHT) sowie die Astro- und Feinwerktechnik Adlershof GmbH. Wissenschaftliche Partner sind das ÖAW Institut für Weltraumforschung und die Universität Kaiserslautern. Der Betrieb von HP³ erfolgt durch das Nutzerzentrum für Weltraumexperimente (MUSC) des DLR in Köln. Darüber hinaus hat das DLR Raumfahrtmanagement mit Mitteln des Bundesministeriums für Wirtschaft und Energie einen Beitrag des Max-Planck-Instituts für Sonnensystemforschung zum französischen Hauptinstrument SEIS (Seismic Experiment for Interior Structure) gefördert.
Ausführliche Informationen zur Mission InSight und zum Experiment HP³ finden Sie auf der DLR-Sonderseite zur Mission mit ausführlichen Hintergrundartikeln sowie in der Animation und der Broschüre zur Mission und über den Hashtag #MarsMaulwurf auf dem DLR-Twitterkanal. Aktuell berichtet Prof. Tilman Spohn, leitender Wissenschaftler des HP³-Experiments, in Blogposts über die Aktivitäten des 'Marsmaulwurfs‘.