Astronaut Scott Tingle controls DLR robot Justin from space


{kind=link}
{kind=link}
- Test run at the DLR site in Oberpfaffenhofen: artificial intelligence for the cooperation of robot and astronaut
- Experiment with more challenging tasks for the human-machine team in preparation for planetary exploration missions
- Focus: Space, Artificial Intelligence, Robotics, Human Spaceflight
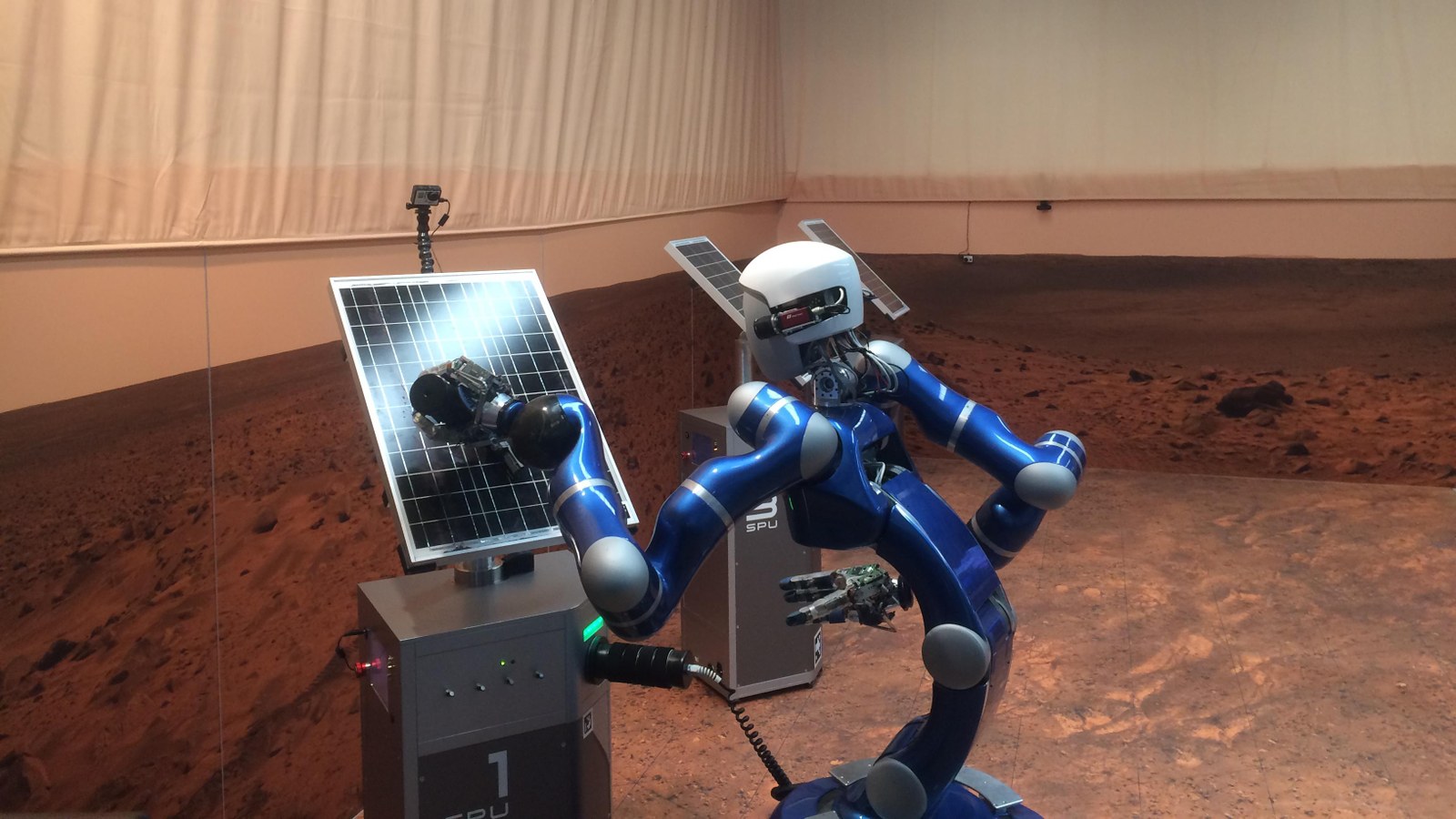
The operator orbits Earth at an altitude of 400 kilometres, while the assistant works on the ground. During the 'SUPVIS Justin' experiment, those who send and receive commands conduct a long-distance relationship. Aboard the International Space Station (ISS) on 2 March 2018, United States astronaut Scott Tingle selected the required commands on a tablet, while the robot Justin of the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) performed the necessary work on a solar panel in a terrestrial laboratory in Oberpfaffenhofen, Germany, as instructed. Engineers at the DLR-Institute of Robotics and Mechatronics (RM) had fitted their robot with the necessary artificial intelligence so that it could perform these subtasks autonomously and without detailed individual commands. “The robot is clever, but the astronaut is always in control," says Neal Lii, the DLR project manager. In August 2017, the experiment was successfully carried out for the first time as part of the METERON Project (Multi-Purpose End-to-End Robotic Operation Network), together with the European Space Agency (ESA). In the second test run, the tasks have now become more demanding for both the robot and the astronaut.
Robot with artificial intelligence
For the experiment, the robot Justin was relocated to Mars as a worker – visually at least – in order to inspect and maintain solar panels as autonomously as possible – task by task – and to provide the orbiting astronaut with constant feedback for the next stages of work. "Artificial intelligence allows the robot to perform many tasks independently, making us less susceptible to communication delays that would make continuous control more difficult at such a great distance," Lii explains. "And we also reduce the workload of the astronaut, who can transfer tasks to the robot." To do this, however, astronauts and robots must cooperate seamlessly and also complement one another.
Human-machine team
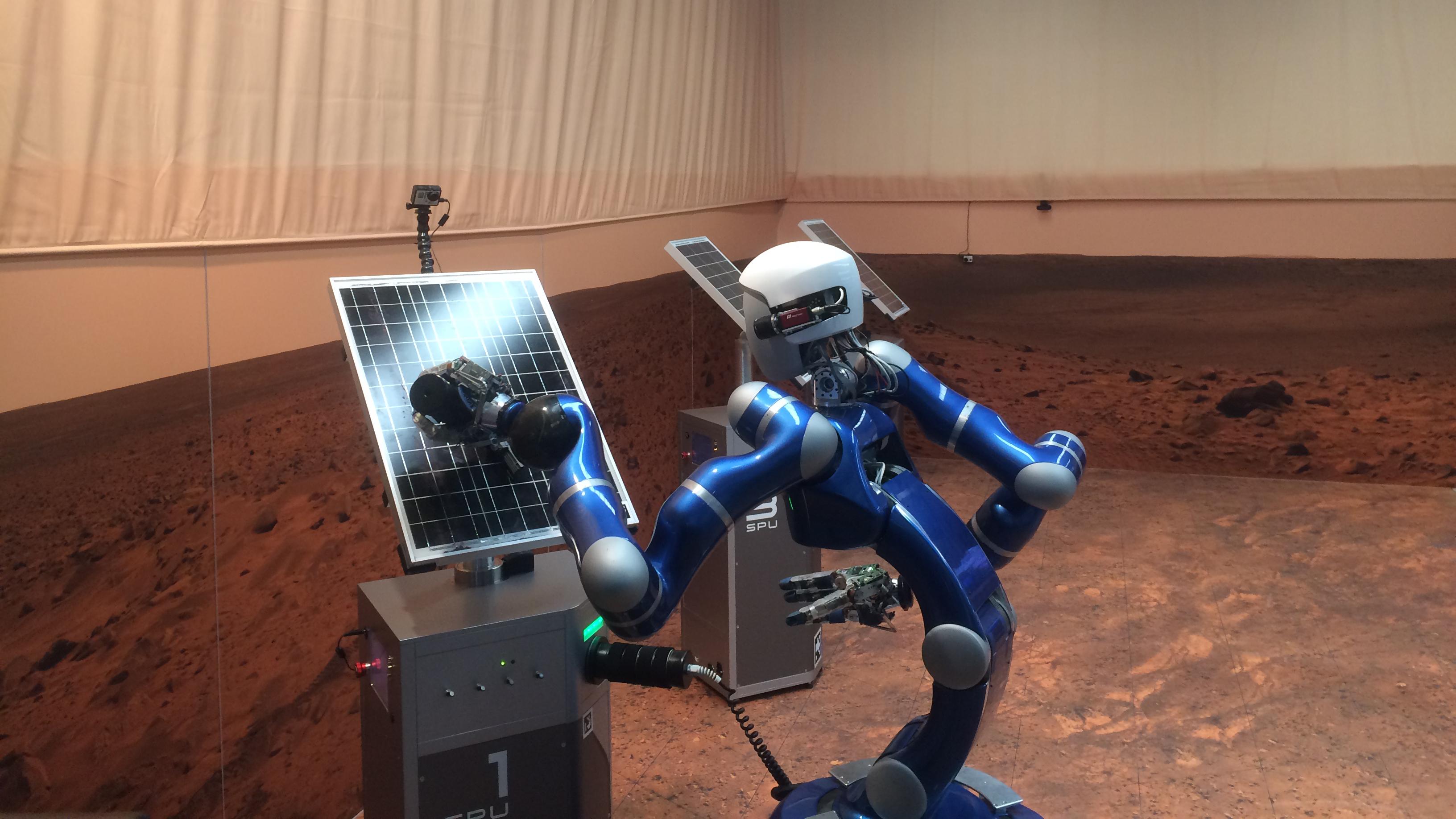
To begin with, scientists made the human and machine team handle a few standard tasks, which had already been practised in advance on the ground and also performed by Justin from the ISS. But subsequent assignments went well beyond mechanical tasks. The solar panels were covered with dust – this would be a problem for a planetary mission on Mars, for example, which astronauts and robots would have to overcome. The panels also were not optimally directed towards the sunlight. When operating solar panels for a Martian colony, this would soon result in the energy supply becoming weaker and weaker.
Tingle, who was viewing the working environment on the Red Planet through Justin's eyes on his tablet, quickly realised that Justin needed to clean the panels and remove the dust. And he also had to realign the solar components. To do this, he could choose from a range of abstract commands on the tablet. “Our team closely observed how the astronaut accomplished these tasks, without being aware of these problems in advance and without any knowledge of the robot's new capabilities," says DLR engineer Daniel Leidner. The new tasks also posed a challenge for Justin. Instead of simply reporting whether he had fulfilled a requirement or not, as in the initial test run in August 2017, this time he and his operator had to ‘estimate’ the extent to which he had cleaned the panels, for example. In the next series of experiments in summer 2018, the German ESA astronaut Alexander Gerst will take command of Justin – and the tasks will again become slightly more complicated than before because Justin will have to select a component on behalf of the astronaut and install it on the solar panels.
The astronaut's partner
"This is a significant step closer to a manned planetary mission with robotic support," says Alin Albu-Schäffer, head of the DLR Institute of Robotics and Mechatronics. In such a future, an astronaut would orbit a celestial body – from where he or she would command and control a team of robots fitted with artificial intelligence on its surface. "The astronaut would therefore not be exposed to the risk of landing, and we could use more robotic assistants to build and maintain infrastructure, for example, with limited human resources." In this scenario, the robot would no longer simply be the extended arm of the astronaut: "It would be more like a partner on the ground."