InSight mission – a fresh attempt for the first ‘Mole’ on Mars

{kind=link}
{kind=link}
- Support structure has been removed from the instrument.
- A hard crust has prevented the filling of a small crater around the ‘Mole’.
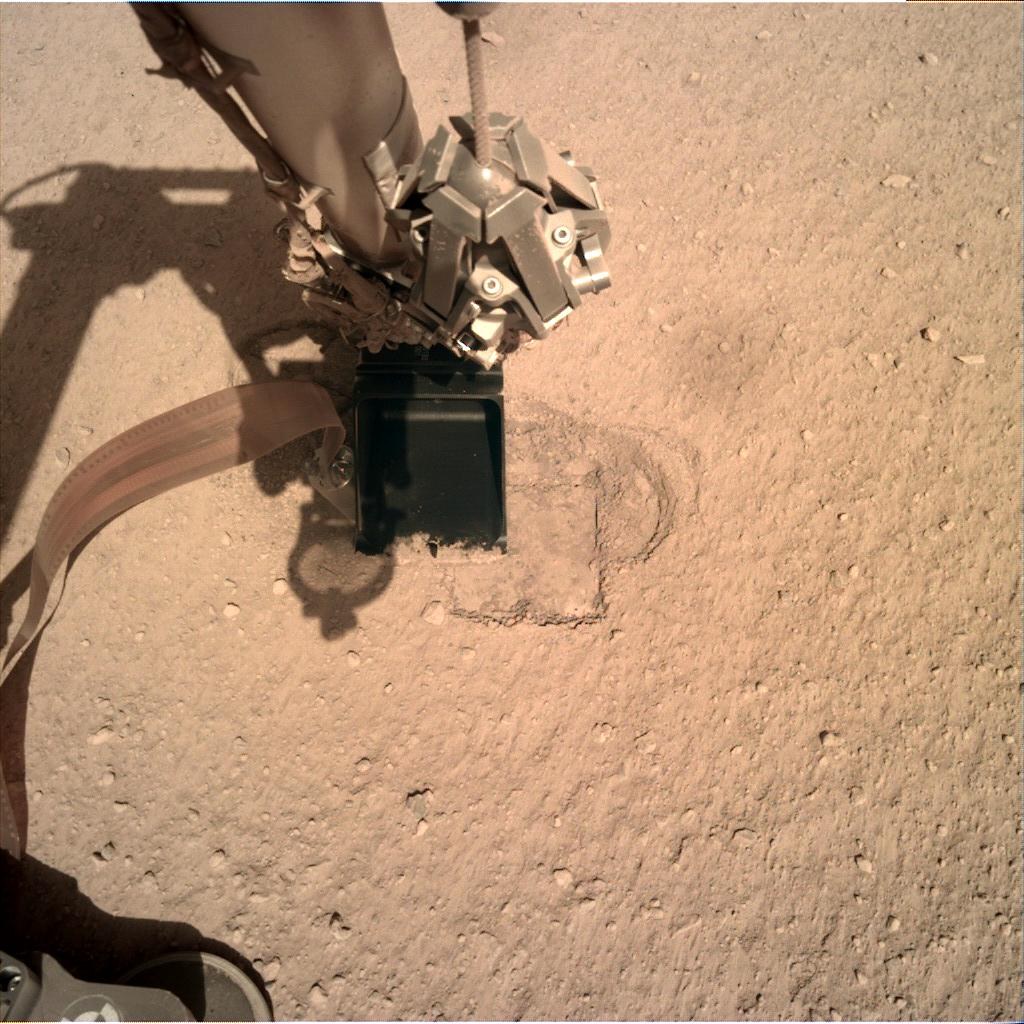
- The shovel on the robotic arm of the InSight lander is now going to be used to press the Mars ‘Mole’ against the side of the ‘mole hole’.
- Focus: space, planetary exploration
Only five centimetres of the Mars ‘Mole’ are still protruding above the planet’s surface, and it is thought that it could have initially driven itself as much as 35 centimetres into the subsurface. A small crater has formed around the shaft, with the result that the small penetrometer is experiencing insufficient friction against its exterior to be able to move deeper. Initial attempts to fill this ‘Mole hole’ using the arm of the InSight lander and its shovel have failed due to the strength of the surface crust. Researchers from the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) and NASA’s Jet Propulsion Laboratory (JPL) are now making a new attempt. They are planning to press the Mole sideways against the crater wall using the scoop of the robotic arm in order to give it enough traction and friction to burrow deeper into the surface.
“At a depth of 35 centimetres, the Mole left the guide springs in its casing and then began to precess due to the lack of soil friction, without advancing any further,” explains Tilman Spohn from the DLR Institute of Planetary Research, and Principal Investigator of the Heat Flow and Physical Properties Package (HP³) experiment. “We want to use lateral pressure provided by the robotic arm’s scoop to create the friction that has been lacking.” The Mole works like a self-hammering nail, so its recoil has to be absorbed using friction.
In June 2019, the researchers first removed the support structure for the HP³ experiment, exposing the Mars Mole to view. “It appears that a solid crust composed of approximately 10 centimetres of cohesive sand is overlying very loose sand,” says Spohn, who explains this in his mission logbook. In July and August 2019 attempts were made to ‘close’ the hole around the Mars mole using first the flat blade and then the tip of the scoop on the robotic arm. However, the crust turned out to be too hard.
The new strategy, described as ‘pinning’ by the team, will be executed on Mars over the coming weeks. The Mole will resume its hammering, aided by the lateral pressure of the arm. However, this technique cannot be fully tested out on Earth in advance. JPL in California has set up a working mock-up of the InSight lander in a test field and installed a replica of DLR’s HP³ experiment. While this allows the movements of the robotic arm to be practised, the scientists cannot fully replicate the soil without further information about its formation and composition. “All we know about the soil is what we can see in the images InSight sends us,” says Spohn.
The team of researchers is already considering alternative steps that may have to be taken in future. Another option is to use the scoop to scrape surface material into the hole, rather than trying to compress it. The robotic arm presents a challenge no matter what solution is selected. It was designed to be as light and low in energy consumption as possible, and was only intended to lift the InSight experiments onto the Martian surface. It moves carefully and halts any movement that exceeds certain parameters. This can occur for many reasons, from a joint motor overvoltage to insufficient heating. Unlike the robotic arm on NASA’s Curiosity rover, it does not have any force sensors, so it cannot detect how much force it is exerting and cannot perform a pressing motion continuously. “We are asking the arm to punch above its weight,” said Ashitey Trebi-Ollennu, the lead arm engineer at JPL. “It cannot press on the Mole the way a person can. This would be easier if it could, but that is just not the arm we have.”
The HP3 instrument on NASA’s InSight mission
The InSight mission is being carried out by NASA’s Jet Propulsion Laboratory (JPL) in Pasadena, California, on behalf of the agency’s Science Mission Directorate. InSight is part of NASA’s Discovery Program. DLR is contributing the Heat Flow and Physical Properties Package (HP³) experiment to the mission. The scientific leadership lies with the DLR Institute of Planetary Research, which was also in charge of developing and implementing the experiment in collaboration with the DLR Institutes of Space Systems, Optical Sensor Systems, Space Operations and Astronaut Training, Composite Structures and Adaptive Systems, and System Dynamics and Control, as well as the Institute of Robotics and Mechatronics. Participating industrial partners are Astronika and the CBK Space Research Centre, Magson GmbH and Sonaca SA, the Leibniz Institute of Photonic Technology (IPHT) as well as Astro- und Feinwerktechnik Adlershof GmbH. Scientific partners are the ÖAW Space Research Institute at the Austrian Academy of Sciences and the University of Kaiserslautern. The DLR Microgravity User Support Center (MUSC) in Cologne is responsible for HP³ operations. In addition, the DLR Space Administration, with funding from the German Federal Ministry for Economic Affairs and Energy, supported a contribution by the Max Planck Institute for Solar System Research to the French main instrument SEIS (Seismic Experiment for Interior Structure).
Detailed information on the InSight mission and the HP3 experiment is available on DLR’s dedicated mission site with extensive background articles. You can also find information in the animation and brochure about the mission or via the hashtag #MarsMaulwurf on the DLR Twitter channel. Tilman Spohn, the Principal Investigator for the HP³ experiment, is also providing updates in the DLR Blog portal about the activities of the Mars 'Mole'.