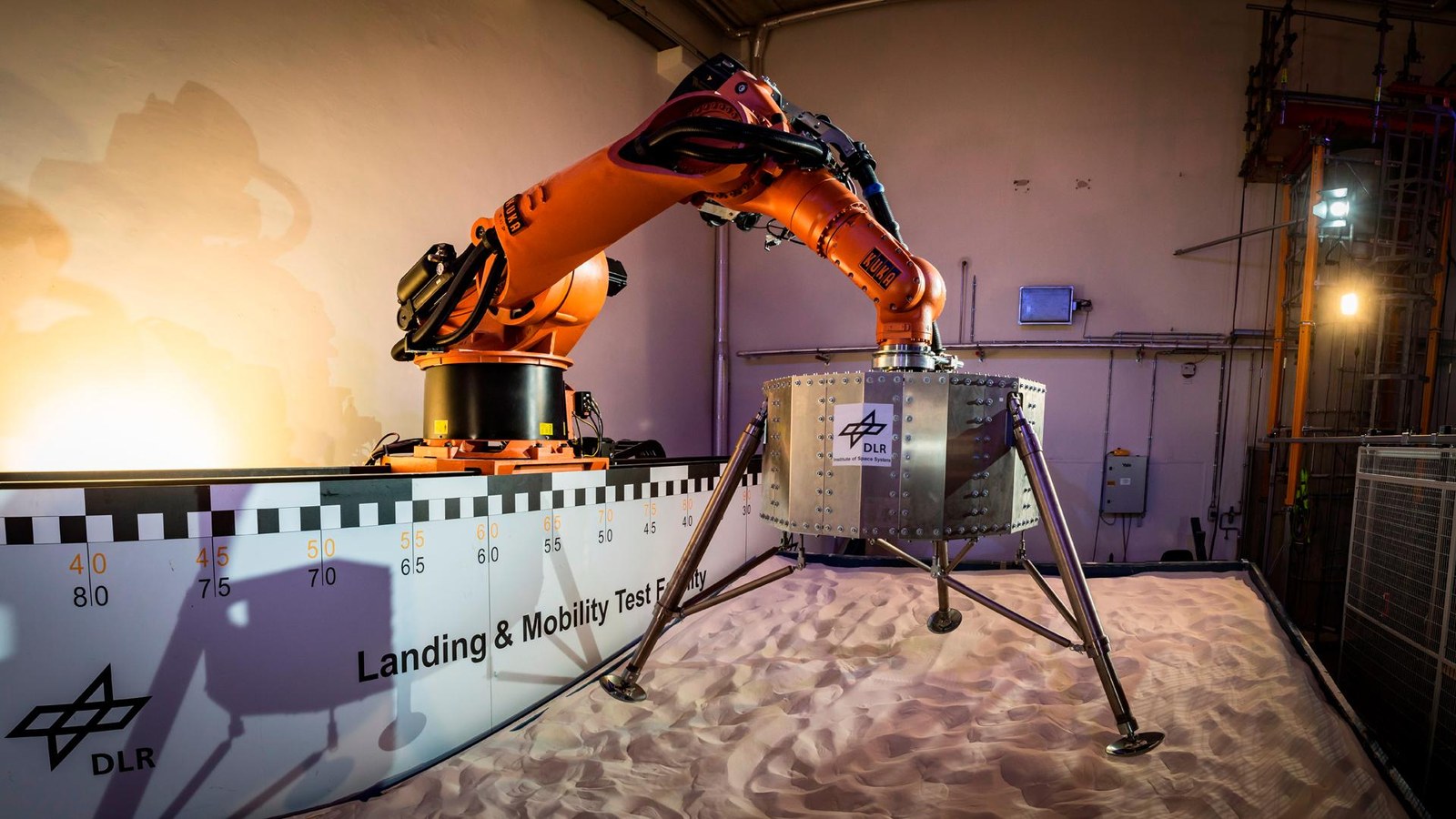
Lander Engineering Model (LEM) on the robot (KR500), ready for a drop test
A modular testbed has been set up at the DLR Institute of Space Systems in Bremen to support development activities for landing systems. The aim is to investigate the touchdown behaviour of landing systems with realistic simulations of weight, dynamics, and planetary surfaces in order to derive findings that are relevant, for example, when landing on a planet.
A modular testbed has been set up at the DLR Institute of Space Systems in Bremen to support development activities for landing systems. The aim is to investigate the touchdown behaviour of landing systems with realistic simulations of weight, dynamics, and planetary surfaces in order to derive findings that are relevant, for example, when landing on a planet.
A modular testbed has been set up at the DLR Institute of Space Systems in Bremen to support development activities for landing systems. The aim is to investigate the touchdown behaviour of landing systems with realistic simulations of weight, dynamics, and planetary surfaces in order to derive findings that are relevant, for example, when landing on a planet.
Laboratory testing of landing behaviour on planets
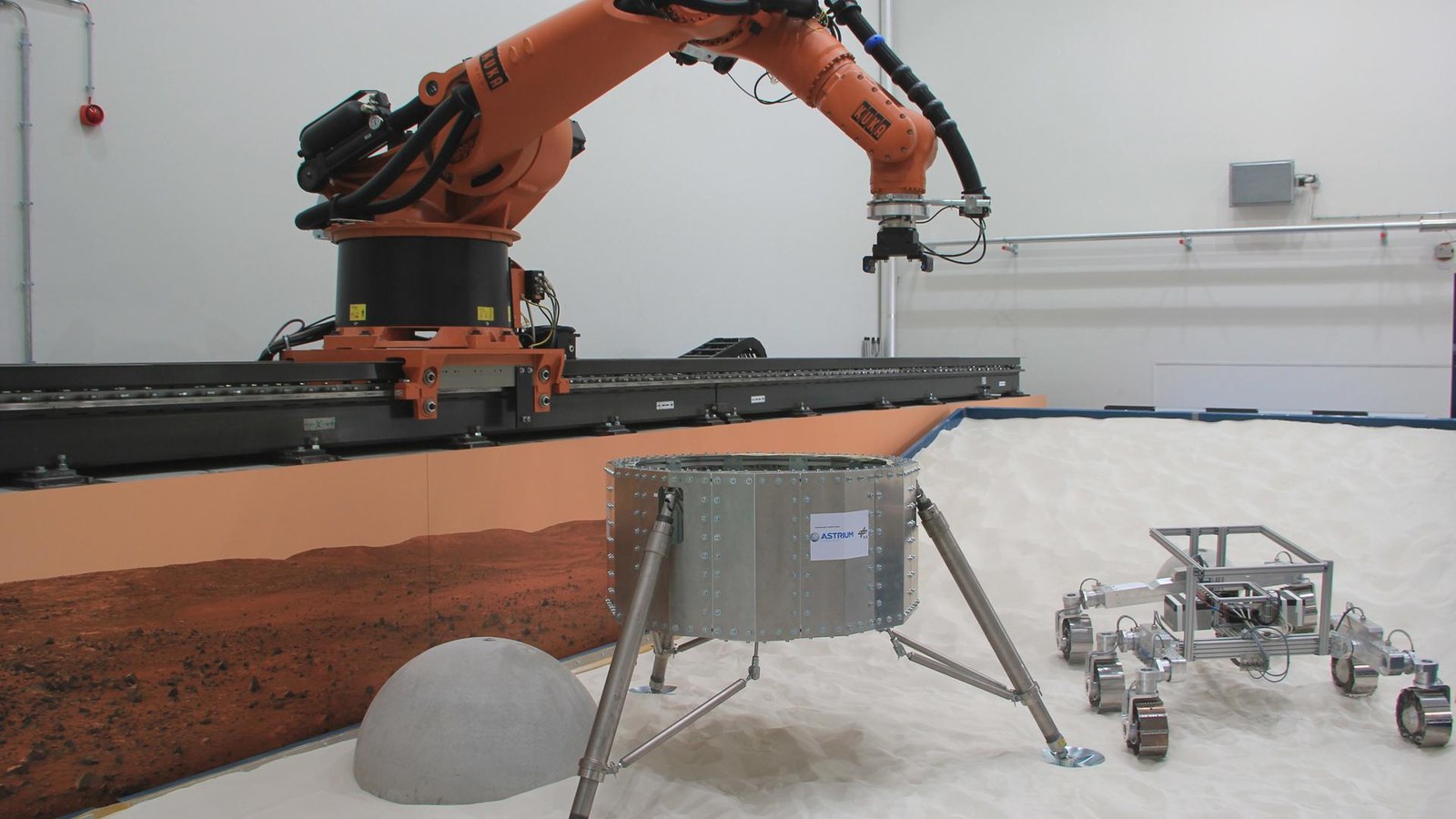
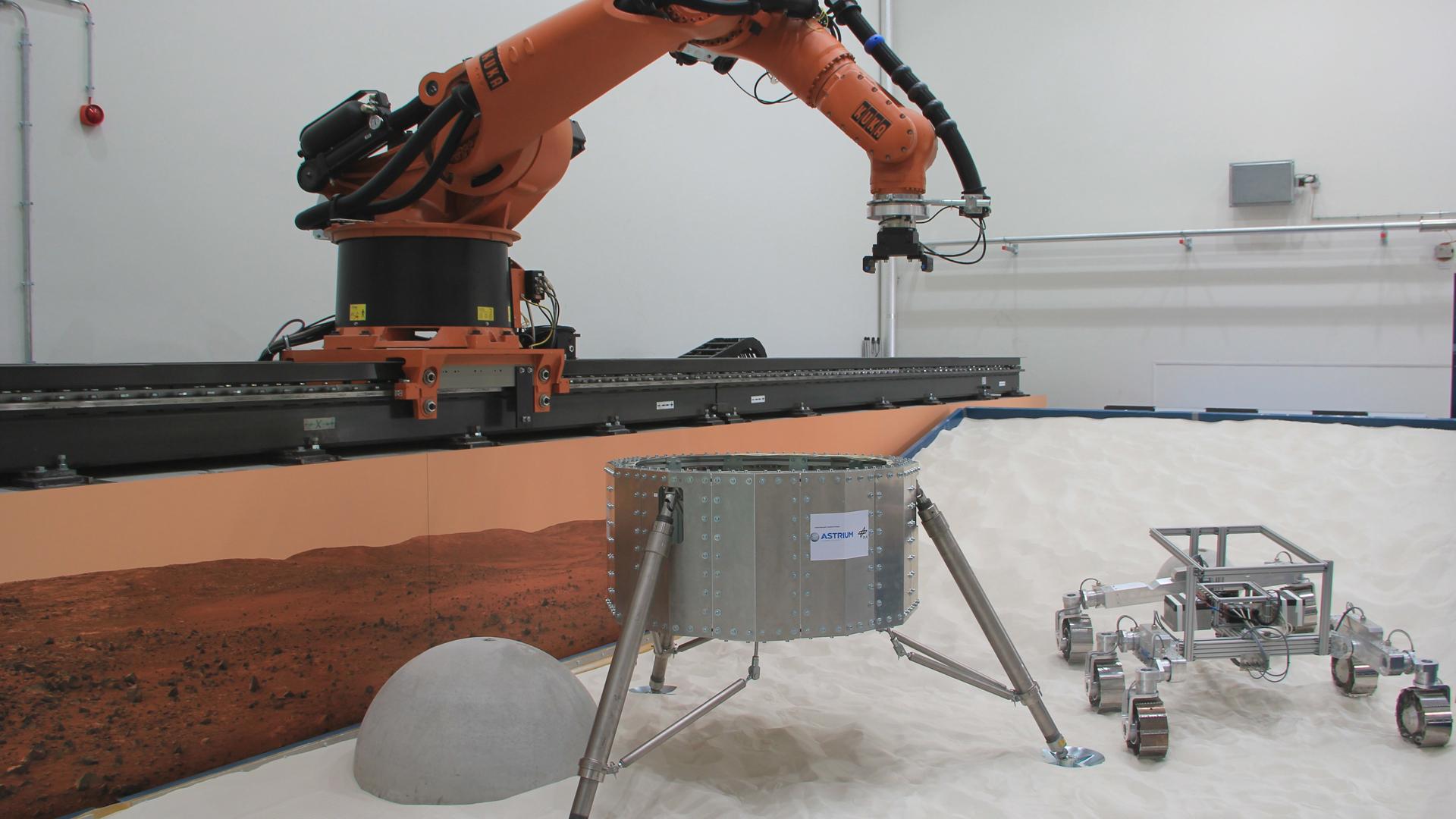
This large-scale facility operated by the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) comprises a modular testbed measuring ten by four metres. The facility offers a simulated planetary surface, designed with granular soil material and selectable rock distributions. In addition, the ground and the facility can be tilted in parts (up to 30 degrees) to simulate landings on an incline, or rovers driving on slopes and dips. Another core element of the facility is a movable industrial robot system with a load capacity of 500 kilograms, which serves to guide test objects with precision.
Landing test objects can be ejected at pre-defined speeds and orientation angles in a 'drop test'. Alternatively, they can be moved with gravitational forces 'removed' by being constantly coupled to the robotic system to simulate the lower gravity on the surfaces of other celestial bodies. In addition to these test modes at a system level, component tests are also carried out with individual landing legs.
Using the facility, scientists can investigate important issues relating to tipping stability during landings on an incline or with lateral speed components, as well as landing safety on rough terrain. In some cases, these questions cannot be fully answered even with reliable numerical simulations due to the difficulty of describing the behaviour of granular surface material during the dynamic phases of movement.
Contact
Volker Speelmann
Head of Research Infrastructures
German Aerospace Center (DLR)
Executive Board department for Innovation, Transfer and Research Infrastructure

{kind=link}
{kind=link}