Cover story from DLRmagazine 172: The MMX rover will explore the mysterious martian moon Phobos
Head over heels into adventure
The MMX rover on the martian moon Phobos
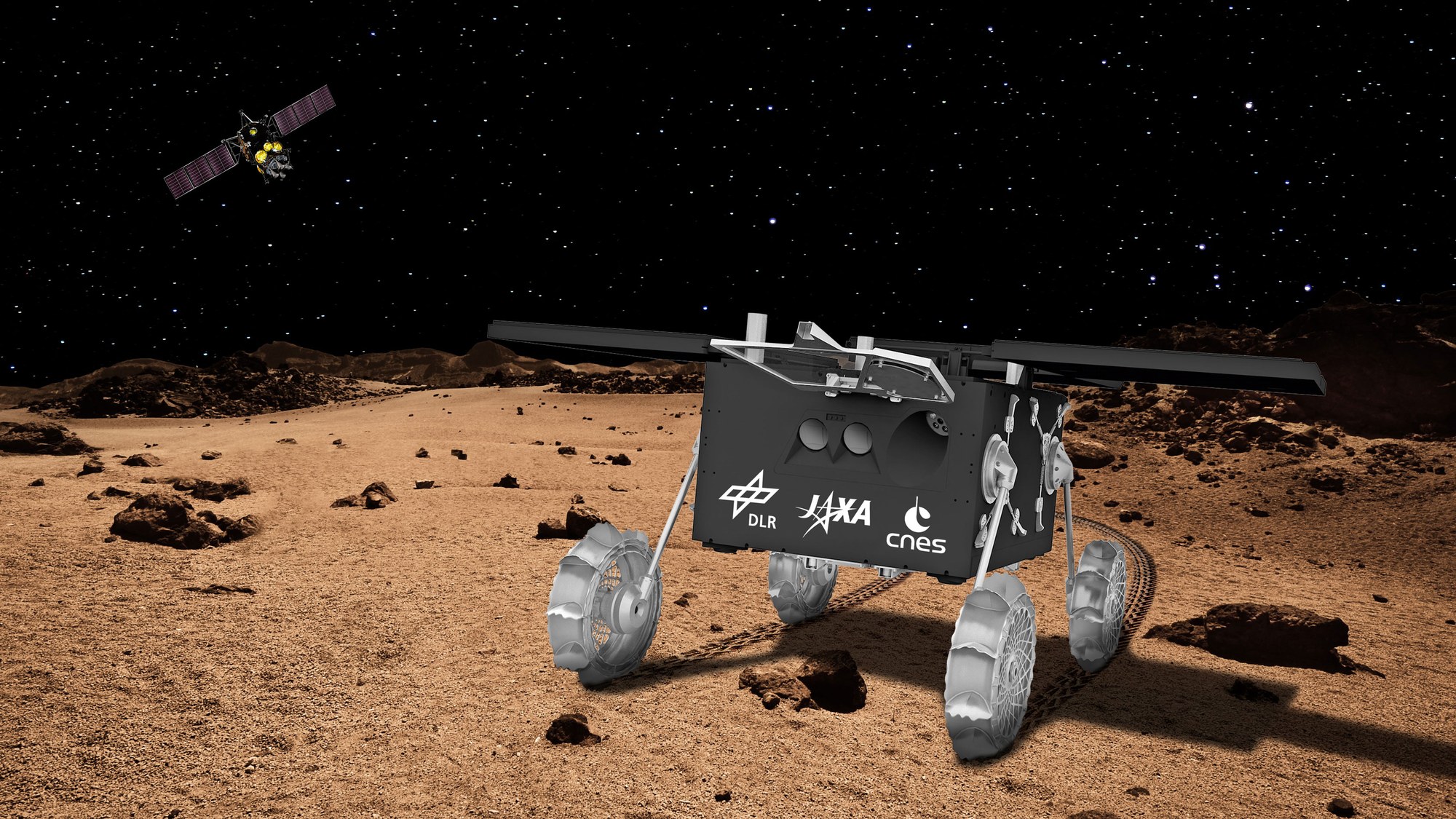
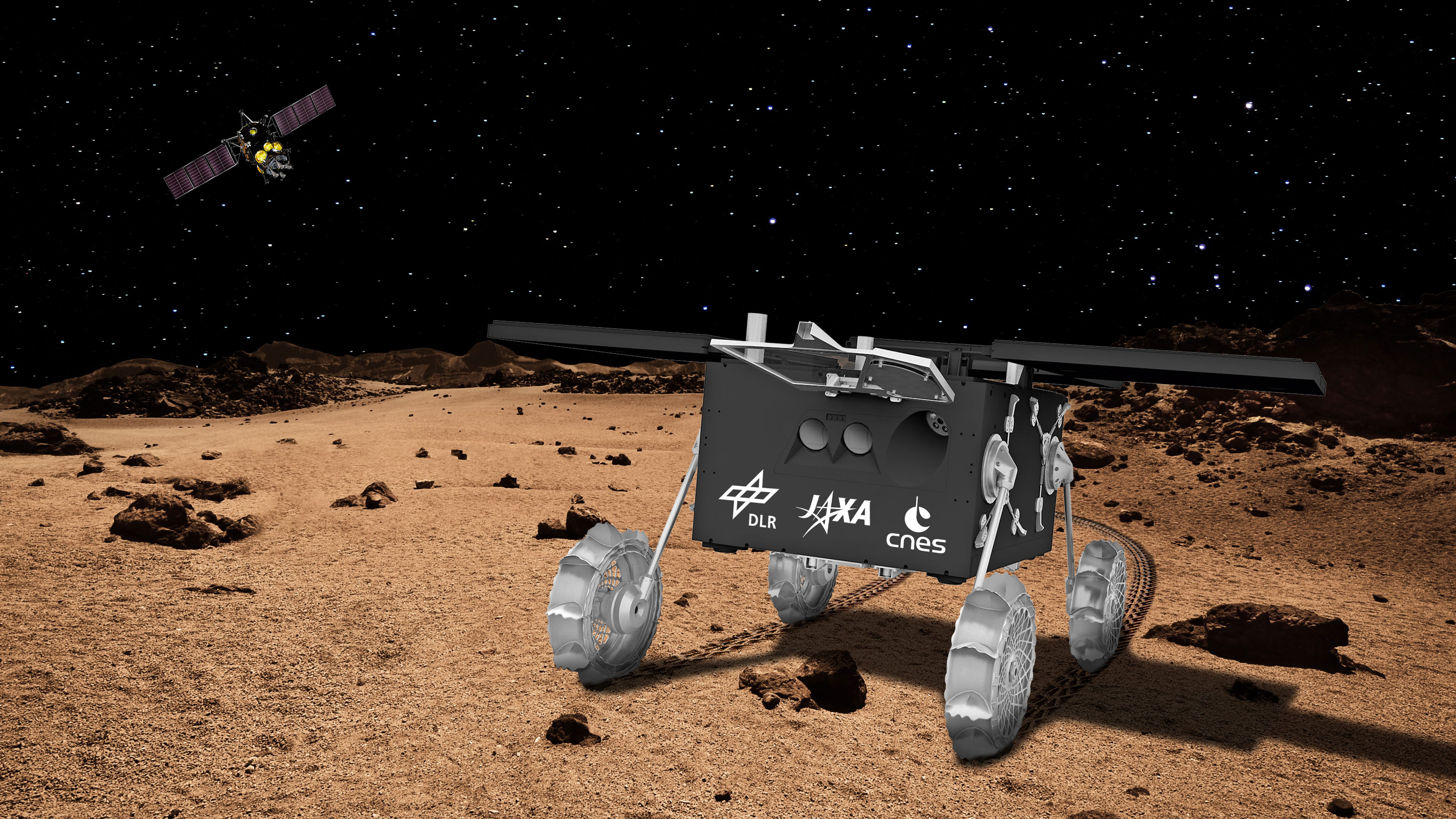
The MMX rover is a joint German-French project within the Japanese Martian Moons eXploration (MMX) mission. At its destination, the martian moon Phobos, it will move around under extremely low gravity.
To this day, Mars' two moons Phobos and Deimos remain a mystery. The Martian Moons eXploration (MMX) mission of the Japan Aerospace Exploration Agency (JAXA) is set to explore the two moons in the second half of this decade. Accompanying MMX will be a Franco-German rover, which is being developed, built and operated in close cooperation between DLR and the French space agency, CNES. Following its separation from the MMX mothercraft and its tumbling free-fall descent and landing on Phobos – the larger of the two moons – the rover will upright itself and deploy its solar panels. Once upright, it will become the first rover to travel across a small body under extremely low gravity. The tests and preparations to make this 'first' a reality are currently underway – here on Earth.
A glass pane similar in size to a giant flat-screen TV offers a view into the clean room at CNES (Centre national d'études spatiales) in Toulouse. The 25-kilogram MMX rover lies in the middle of the room. Still without its solar panels, it is about the size of a crate. As it stretches out its four delicate legs with their – comparatively large – paddle wheels, it looked almost finished at the end of January. On the previous days, these wheels were tested for their mobility, as was the unfolding of the legs that hold them. Together they form the rover's locomotion system. Once on Phobos, this system will enable the rover to upright itself following ifs free-fall descent from a height of between 40 and 100 metres, no matter how it eventually lands. The system will also play a major role during the rest of the mission, as it will also be used to align the solar panels with the Sun and to lower the rover for scientific measurements.
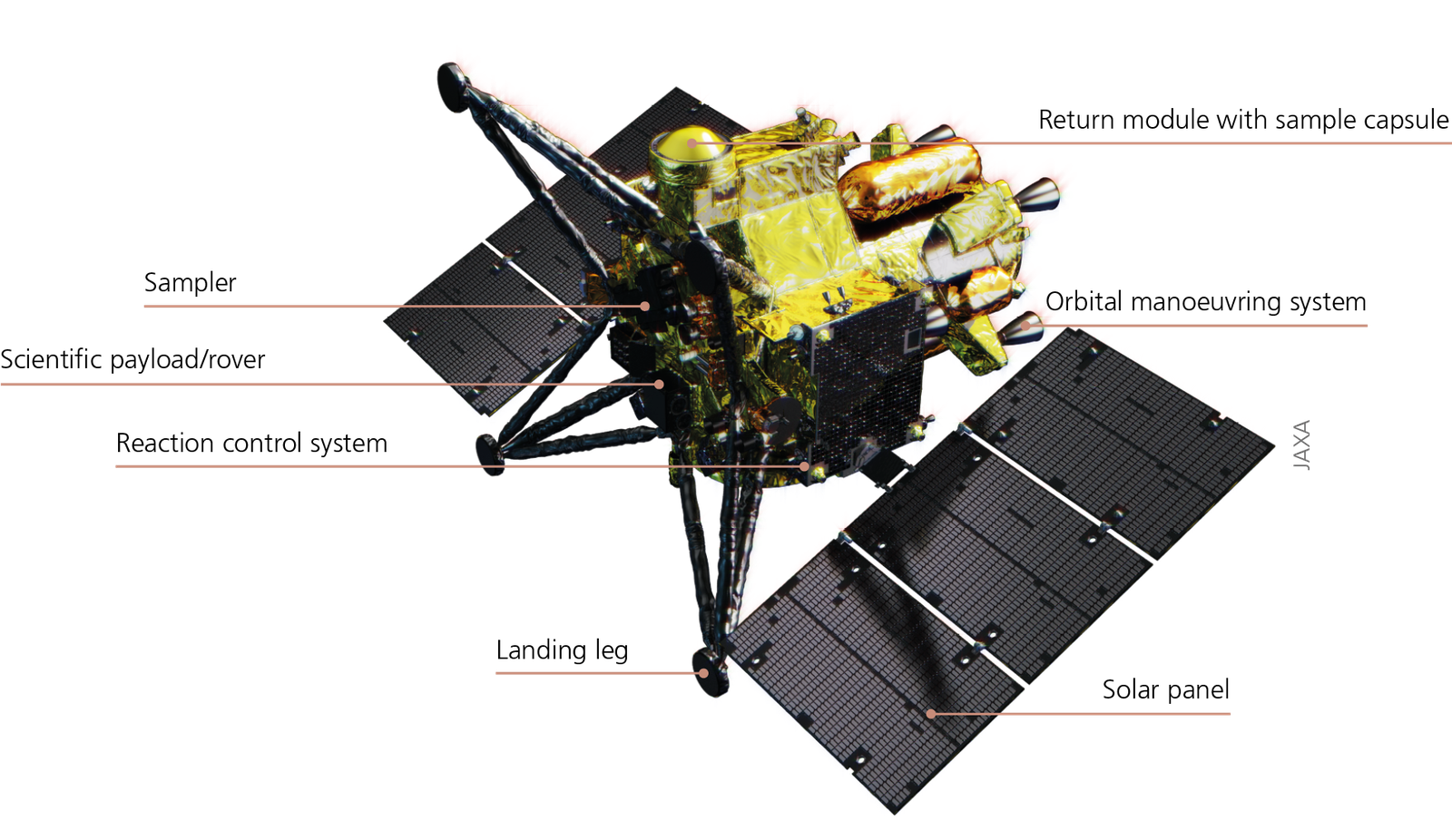
The MMX probe
MMX is a mission of the Japanese space agency, JAXA, with contributions from NASA, ESA, CNES and DLR. Launch is expected in September 2024. The mission is tasked with characterising the martian moons Phobos and Deimos, and clarifying how and where the two satellites formed.
However, the terrestrial test of this locomotion system did not involve the rover driving along a test track or positioning itself upright from various starting positions. Instead, it was lifted off the ground in the clean room, leaving the rover's four legs and wheels floating in the air. This was to ensure that they were not put under an unnecessary load. Earth's gravity would be far too strong for the fine lightweight construction, which was conceived and designed at DLR's Robotics and Mechatronics Center for use under the extremely low gravity on Phobos, which is only one two-thousandth of that on Earth. During the tests, the wheels rotated individually in the air. The legs were then each rotated 400 degrees. The sequence of leg movements that ensures the rover can right itself from any starting position and the sequence that ensures the correct alignment of the solar panels to the Sun were also tested. The rover passed all tests: movements that had until now only been simulated functioned flawlessly in practice with the hardware involved.
A very special test was carried out in Toulouse, during which no visitors were allowed in the clean room. The engineers used special LED lights to explore the rover's various 'shutters' – hinged panes that protect the individual cameras and instruments during landing. These protective windows are supposed to open following a successful landing. Immediately after the landing, an image of the surface of Phobos will be acquired through one of these dust-covered protective windows in order to confirm the landing. Once the dust kicked up by the rover's landing has settled, the shutters will be opened.
But getting to the point at which the first image can be taken, and then the point at which the MMX rover can travel its first few centimetres on Phobos, requires surviving the landing itself. The MMX mothercraft will release the rover, which will descend in a free fall towards Phobos. The properties of the moon's surface are still not well understood, but it is likely that the rover will bounce off the ground several times and tumble before finally coming to rest. The rover is designed to autonomously upright itself with the legs of its locomotion system in the correct orientation, no matter the position in which it comes to rest. This is crucial for the deployment of its solar panels, which must then be pointed towards the Sun to begin charging the rover's battery. Once charged, the exploration of Phobos can begin.
A total of four cameras will then begin to supply us with images from the martian moon. Two navigation cameras look ahead and allow for the production of a three-dimensional representation of the terrain in front of the rover. With these images, engineers can recognise obstacles and plan the rover's route accordingly. The rover will use these data to come to a stop in front of obstacles or even drive around them entirely autonomously. The high spatial resolution of the images also makes them very well suited for geological analyses. The other two cameras, called 'wheelcams', are located underneath the rover. They monitor the contact areas beneath the two left wheels and record track depth, profile imprint and how the ground material is displaced by the rover's motion. This will help researchers draw conclusions about the properties of the moon's surface. The two wheel cameras can record short film sequences to enable the detailed analysis of the driving behaviour.
The MMX rover will spend approximately 100 days on Phobos, and centimetre by centimetre, it could explore a distance of up to 100 metres. Although it might not sound like much, it would be an enormous accomplishment for the small four-wheeled vehicle due to the impact of the moon's low gravity on its speed. There will also most probably be stones in the landing area that the rover will have to navigate around in an elaborate way. The low gravity makes any such manoeuvre a delicate balancing act. Any motion that is too dynamic could cause the rover to lift off of the surface – with unforeseeable consequences.
This rover is part of the Martian Moons eXploration (MMX) mission. It will explore the Martian moon Phobos for around 100 days. After landing, it will probably bounce off the ground several times and roll over due to the low gravity on Phobos. From this situation, it must autonomously upright itself with the help of its locomotion system and then deploy its solar panels. Without its solar panels, the MMX rover is about the size of a crate.
Video: MMX rover starts its mission
Your consent to the storage of data ('cookies') is required for the playback of this video on Quickchannel.com. You can view and change your current data storage settings at any time under privacy.
Video: MMX rover starts its mission
This rover is part of the Martian Moons eXploration (MMX) mission. It will explore the Martian moon Phobos for around 100 days. After landing, it will probably bounce off the ground several times and roll over due to the low gravity on Phobos. From this situation, it must autonomously upright itself with the help of its locomotion system and then deploy its solar panels. Without its solar panels, the MMX rover is about the size of a crate.
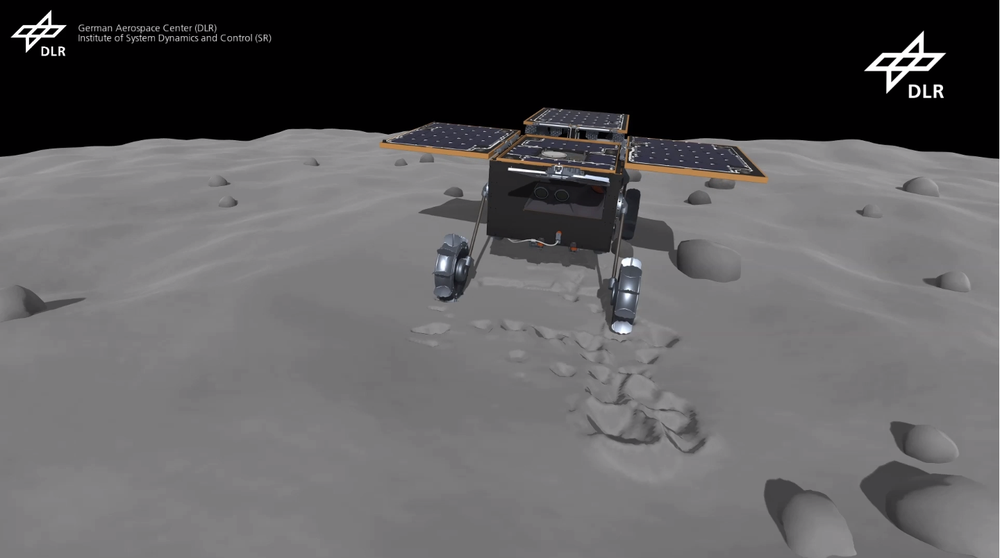
The rover's speed will initially be less than one millimetre per second but it could be increased up to approximately one millimetre per second as the team's experience with the terrain grows. Possible surface properties and their impact on the rover's driving behaviour were analysed in advance at the DLR Institute of System Dynamics and Control using a physics simulation developed in-house.
The vast distance between Earth and Mars represents an additional challenge, as does the fact that data from the rover must be sent to the mothercraft before it can be transmitted to Earth. The total signal transit time from the rover to the mothercraft to Earth and back again will be approximately two days. As a result, the teams at the two rover control centres at CNES in Toulouse and at DLR's Microgravity User Support Center (MUSC) in Cologne will each have to program driving sequences that the rover can execute independently. If all goes according to plan, the MMX rover will become the first rover to explore a significant distance on the surface of a small astronomical body with low gravity. In doing so, it will face a number of challenging conditions. A 'Phobos day' lasts just under eight hours, during which the temperature on the rover will fluctuate between minus 150 and plus 50 degrees Celsius. At one third the length of an Earth day, this means the rover will experience very rapid temperature changes. Therefore, it must be designed in such a way that the temperature inside the rover is always kept within a range that ensures the electronics are protected.
In addition to the cameras, the rover will also carry the RAX Raman spectrometer, developed at the DLR Institute of Optical Sensor Systems, and the miniRAD radiometer, developed at the DLR Institute of Planetary Research. RAX will be used to explore the mineralogical composition of the surface of Phobos, while miniRAD will collect data that will allow researchers to analyse its thermal properties. These measurement data will help to shed light on the hitherto unexplained origin of the martian moons Phobos and Deimos.
Final tests in the DLR clean room in Bremen
At the DLR Institute of Space Systems in Bremen tests including functional tests, the vibration test, the thermal vacuum test and the rover segment’s electromagnetic compatibility test were then carried out before the MMX rover was delivered to Toulouse in November 2022.
Both instruments are integrated alongside the cameras in the rover's lightweight chassis, which was developed and manufactured at the DLR Institute of Lightweight Systems. The chassis then underwent further integration at the DLR Institute of Space Systems in Bremen, which included the assembly of the locomotion system. Tests including functional tests, the vibration test, the thermal vacuum test and the rover segment's electromagnetic compatibility test were then carried out before the MMX rover was delivered to Toulouse in November 2022.
Final assembly took place at CNES in Toulouse, including the integration of the power and communication systems as well as the scientific instruments. In Toulouse, the complete MMX rover will undergo its final tests for space qualification. The Mechanical and Electrical Connection and Support System (MECSS), which functions as the connection and separation system and which will later separate the rover from the mothercraft and send it on its journey to Phobos, is already assembled. This subsystem was also developed by DLR. The flight model is scheduled for delivery to Japan in summer 2023. It is a tight schedule that has placed enormous demands on the teams at DLR and CNES in recent months and years. The rover will separate from the exploration module at a height of approximately 40 to 100 metres before falling slowly to the surface. Once there, it will likely perform several 'somersaults', remain unharmed and come to rest in an unpredictable position.
Final preparations before launch
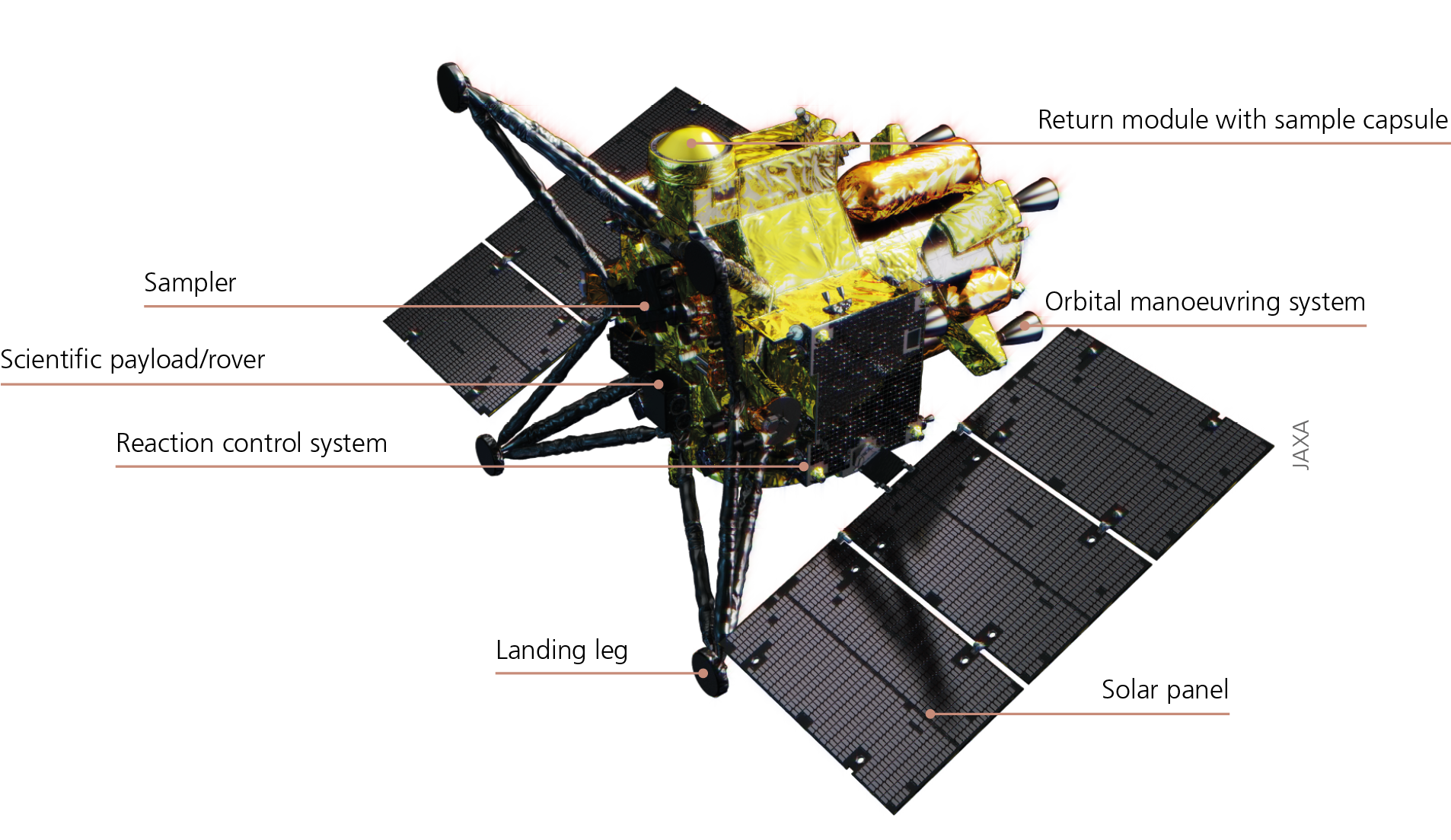
The German-French rover will finally be integrated into the MMX mothercraft at JAXA. To be more precise, it will be integrated into the spacecraft's exploration module, which itself is equipped with various instruments and even landing legs to take samples of the martian moon close to the rover's landing site. The return module will transport the samples to Earth at the end of the mission in 2029. The MMX mission is scheduled for launch in September 2024 on board an H3 rocket from Tanegashima Space Center. This is the start of the next window in which Mars and Earth will be in a favourable position for a flight. Before that, however, the MMX spacecraft and rover must undergo final space qualification tests to test their resistance to the vibrations they will be subjected to during the launch, as well as the heat and cold and vacuum conditions in space.
As the launch to Mars and its moons draws closer, the excitement of the team is clear on days such as that Friday at the end of January in Toulouse. Following the tests, the legs and the wheels were returned to their launch configuration. Nestled tightly against the rover, they are now securely locked in place. They will now remain in this position until the adventure on Phobos begins ...
MMX rover: Possible sequence for raising and deploying the solar panels
The rover will separate from the exploration module at a height of approximately 40 to 100 metres before falling slowly to the surface. Once there, it will likely perform several 'somersaults', remain unharmed and come to rest in an unpredictable position. From this situation, it must autonomously upright itself with the help of its locomotion system and then deploy its solar panels. Only then will the rover be able to 'survive' and move on Phobos.
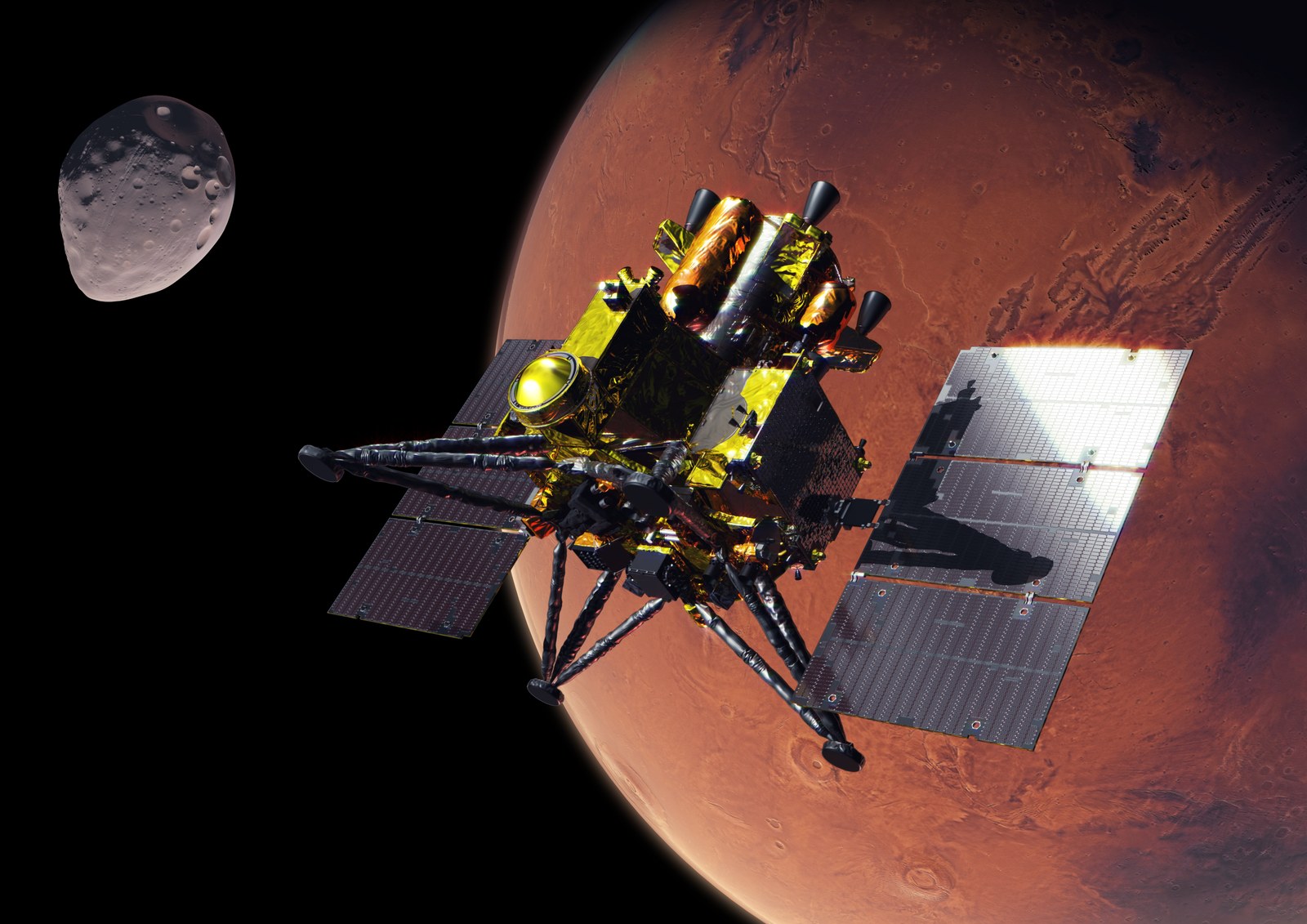
The MMX mission will explore the mysterious martian moons
The Japanese space agency JAXA's MMX (Martian Moons eXploration) mission, which is expected to start in 2024, is intended to deploy a rover and a sample recovery module on the martian moon Phobos for the first time.
MMX is a mission of the Japanese space agency, JAXA, with contributions from NASA, ESA, CNES and DLR. Launch is expected in September 2024, with arrival at Mars taking place in August 2025. The mission is tasked with characterising the martian moons Phobos and Deimos, and clarifying how and where the two satellites formed. On board is a mobile rover. This joint project of CNES and DLR has a mass of just under 25 kilograms, plus four kilograms of associated components on the mothercraft. At DLR, the rover was developed under the leadership of the Institute of Robotics and Mechatronics, with contributions from the Institutes of Space Systems, Software Technology, Lightweight Structures, System Dynamics and Control, Optical Sensor Systems, and Planetary Research, as well as Space Operations and Astronaut Training with the involvement of the Microgravity User Support Center (MUSC). The rover will study the geological, physical and mineralogical properties of the surface of Phobos and demonstrate mobility in a challenging low-gravity environment. The data it gathers will also be used to calibrate the instruments on the MMX orbiter and will support the later landing of the exploration module. Data will be exchanged with Earth via the orbiter. The rover will be operated from the CNES control centre in Toulouse and MUSC in Cologne.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}