
Abteilung: Nautische Systeme


Credit:
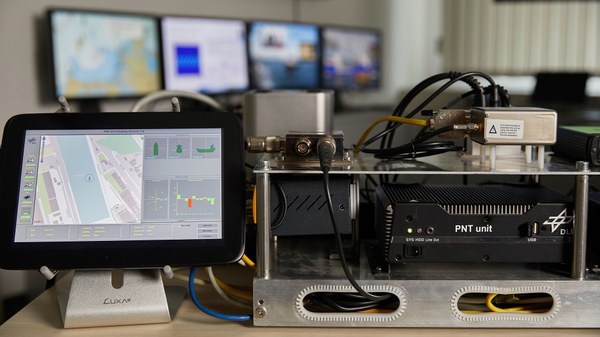
Enno Kapitza für DLR
Die Abteilung Nautische Systeme liefert wissenschaftlich-technische Beiträge zur Unterstützung eines sicheren Schiffsverkehrs auf Weltmeeren und Binnenwasserstraßen. Dazu forschen Wissenschaftler, Ingenieure und Techniker in 3 Arbeitsgruppen an neuen Methoden und Technologien zur Verbesserung der Genauigkeit und Integrität der im maritimen Umfeld von Sensoren und Diensten gelieferten Daten. Die Arbeiten beziehen sich sowohl auf navigationsrelevante Fragestellungen zur Erfassung der Eigenbewegung eines Schiffes als auch auf die maritime Lage- bzw. Situationserfassung.
Wir verfolgen mit unseren Arbeiten folgende wesentlichen Zielstellungen - zur Umsetzung kooperieren wir mit nationalen und internationalen Partnern. Im Rahmen von Standardisierungsaktivitäten bringen wir uns zudem als assoziiertes Mitglied der IALA mit technischen Beiträgen ein.
Bereitstellung zuverlässiger anwendungsspezifischer Positions-, Navigations- und Zeit (PNT) Informationen zur Entwicklung von Assistenzsystemen für die hochautomatisierte/autonome Schifffahrt und Binnenschifffahrt
Entwicklung und Demonstration zuverlässiger Entscheidungs-unterstützungssysteme unter Einsatz multisensorbasierter kooperativer Verkehrslagebestimmung in komplexen Mehrschiff-Situationen
Nachweis der Nutzbarkeit des maritimen Positionierungssystems R-Mode als Backupsystem zur zuverlässigen Positions- und Zeitdatengenerierung für maritime Nutzer im Falle des temporären Ausfalls maritimer PNT Standardsensoren wie GNSS
Ein wichtiges Testfeld zur Erprobung unserer Technologien unter realen Einsatzbedingungen bildet die Ostsee mit dem Forschungshafen Rostock und dem ersten weltweiten Testfeld zur Erprobung der R-Mode Technologie. Für Messkampagnen setzen wir entweder unser kleines Forschungsschiff AURORA ein oder kooperieren mit Partnern wie dem BSH, Scandlines und der Baltic Taucher GmbH.
Die Forschungsgruppen der Abteilung Nautische Systeme


Kontakt
Dr. rer. nat. Ralf Ziebold
Abteilungsleitung
Deutsches Zentrum für Luft- und Raumfahrt (DLR)
Institut für Kommunikation und Navigation
Abteilung Nautische Systeme
Kalkhorstweg 53, 17253 Neustrelitz