
ESS
Der ESS (Experimental Servicing Satellite) – Studie und Labor-Demonstrator

{kind=link}
Unmittelbar im Anschluss an ROTEX begannen wir mit dem Aufbau von Experimenten zur Studie des dynamischen Verhaltens sowie der Rendezvous- und Docking-Fähigkeiten eines frei fliegenden Service-Satelliten, bestehend aus einem Roboterarm montiert auf einem konventionellen Chaser. Ein frei fliegender Tele-Roboter ESS (Experimenteller Service-Satellit) sollte einen defekten Satelliten anfliegen, inspizieren und reparieren. Hierbei ist zu beachten, dass sich die Bewegungen eines am Service-Satelliten montierten Roboterarms erheblich auf das Trägersystem auswirken und sogar zu einer Kollision mit dem Target-Satelliten führen können. Daher müssen die Auswirkungen der Bewegung des Manipulators auf den Trägersatelliten simuliert, interpretiert und eventuell noch am Boden korrigiert werden. Hierbei mussten wir zwei Satellitenkonfigurationen mit ihren jeweiligen kinematischen Ketten berücksichtigen:
- ESS + montierter Manipulator,
- ESS + montierter Manipulator + angedockter Target-Satellit.
Der mit einer Greif- bzw. Haltevorrichtung ausgestattete Manipulator des ESS muss den letzten verbleibenden Bewegungen eines targetseitigen Objekts (z. B. die Hauptsteuerdüse) mithilfe eines Bildverarbeitungssystems folgen, dessen Daten einen erweiterten Kalman-Filter durchlaufen.
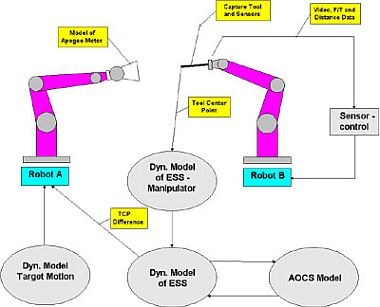
Das dynamische Verhalten des Instandhaltungssatelliten (Chaser) haben wir mit zwei KUKA-Robotern in der unten dargestellten Versuchsanordnung simuliert. Roboter B führt den Einfang- bzw. Andockvorgang aus und Roboter A bildet die gesamte dynamische Beziehung zwischen Chaser- und Target-Satelliten nach, einschließlich der dynamischen Kopplung mit dem Bahn- und Lageregelungssystem (AOCS).

Nach dem Einfangen des Target-Satelliten wird das Gesamtgebilde stabilisiert und neu ausgerichtet. Damit der Manipulator nach dem Einfangen jetzt die Instandhaltung ausführen kann und eine steife konstruktive Kopplung entsteht, wird der Target-Satellit mithilfe einer Andockvorrichtung fixiert.

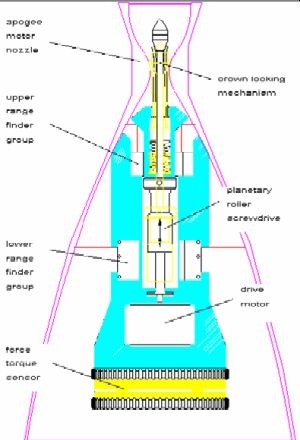

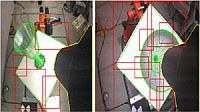
Ein Interface zur Simulation des Bahn- und Lageregelungssystems (AOCS, Attitude and Orientation Control System) bildete das Verhalten des gesamten ESS unter Weltraumbedingungen nach. Eine spezielle, eigenentwickelte Einfangvorrichtung mit sechs Laserentfernungsmessern, einem Kraft-Momenten-Sensor im Handgelenk und einem Stereokamerapaar ermöglichte zusammen mit der Modellierung des dynamischen Verhaltens das vollständig autonome Servoing (die visuell geregelte Ausführung) sowie das Einfahren in die und Arretieren in der Apogäumsmotordüse, einer typischen Komponente eines geostationären Satelliten . Die Visual-Servoing-Phase haben wir im Labor mithilfe des oben skizzierten Zwei-Roboter-Systems simuliert. Ein Roboter hält ein Satellitenmodell mit Apogäumsmotordüse in Originalgröße, beschreibt eine typische Taumelbewegung eines festen Körpers in der Schwerelosigkeit und überlagert diese mit den berechneten dynamischen Wechselwirkungen des Wartungsroboters mit seiner (möglicherweise) freischwebenden Basis. Daher verhält sich im Labor der Wartungsroboter (ein zweiter Roboter) trägheitsbezogen gleich und verfolgt den Satelliten, um die Einfangvorrichtung in die Apogäumsmotordüse einzuführen. Die Annäherung an den Zielsatelliten wird über modellbasiertes maschinelles Sehen in Echtzeit gesteuert. Nachdem der Kontakt zwischen Einfangvorrichtung und Apogäumsmotor hergestellt ist, übernimmt der Kraft-Momenten-Sensor. In beiden Phasen werden alle kartesischen Freiheitsgrade gesteuert.
Downloads
- ESS simulator (220k) (209.9 KB)