
Control
Introduction
Introducing compliant actuators in robotic systems improves mechanical robustness against rigid impacts as well as unknown contact forces and potentially increases the energetic efficiency. The elastic elements acting between motor and link inertias lead to a dynamical behavior of a low-pass filter on external loads. In contrast to classical flexible-joint robots (FJR) where the linear elasticities are mainly a result of weight reduction, the stiffness of compliantly robots, implemented with variable impedance actuators (VIA), is state-dependent and at least an order of magnitude lower such that singular perturbation assumptions do not hold any more. Mechanical compliance provides many benefits, but it also comes at a price; the plant dynamics is under-actuated as the number of dimensions of the configuration space is twice the number of dimensions of the control input space. Moreover, to improve energy storing capabilities and efficiency in general, compliant actuators are often designed such that damping and friction in parallel to the spring is negligible. Thus, unwanted intrinsic oscillatory dynamics may arise. In addition, many variable stiffness robots feature highly nonlinear elasticity. This is what makes control of the link configuration variables a challenging task. Below you can find a selection of publications that introduce the control concepts that are used for the day-to-day operation of David.

Your consent to the storage of data ('cookies') is required for the playback of this video on Youtube.com. You can view and change your current data storage settings at any time under privacy.
Elastic Structure Preserving (ESP) Control
A series of passivity-based control developments that achieve globally asymptotic motion tracking and link-side damping assignment on compliantly actuated robotic systems with highly nonlinear variable stiffness actuators are introduced. The control concept is based on the idea of changing the intrinsic system dynamics only to a minimal extend by solely adding damping terms on the link side and feedforward terms to achieve asymptotic tracking performance. The inherent elastic behavior remains unchanged.
The video below shows the effectiveness these novel control approaches:
Your consent to the storage of data ('cookies') is required for the playback of this video on Youtube.com. You can view and change your current data storage settings at any time under privacy.
Elastic Structure Preserving Impedance (ESPi) Control
The control concept ESPi enables the implementation of a desired link-side stiffness while preserving the intrinsic elastic structure of the system. The video below showcases this methodology for the implementation of a joint and task space impedance behavior.
The video below shows the effectiveness these novel control approaches:

Your consent to the storage of data ('cookies') is required for the playback of this video on Youtube.com. You can view and change your current data storage settings at any time under privacy.
Application of ESP Control to Biantagonistic Variable Stiffness (BAVS) Actuators
The ESP control concept was extended to BAVS actuators, which are implemented in the forearm rotation and wrist of David.
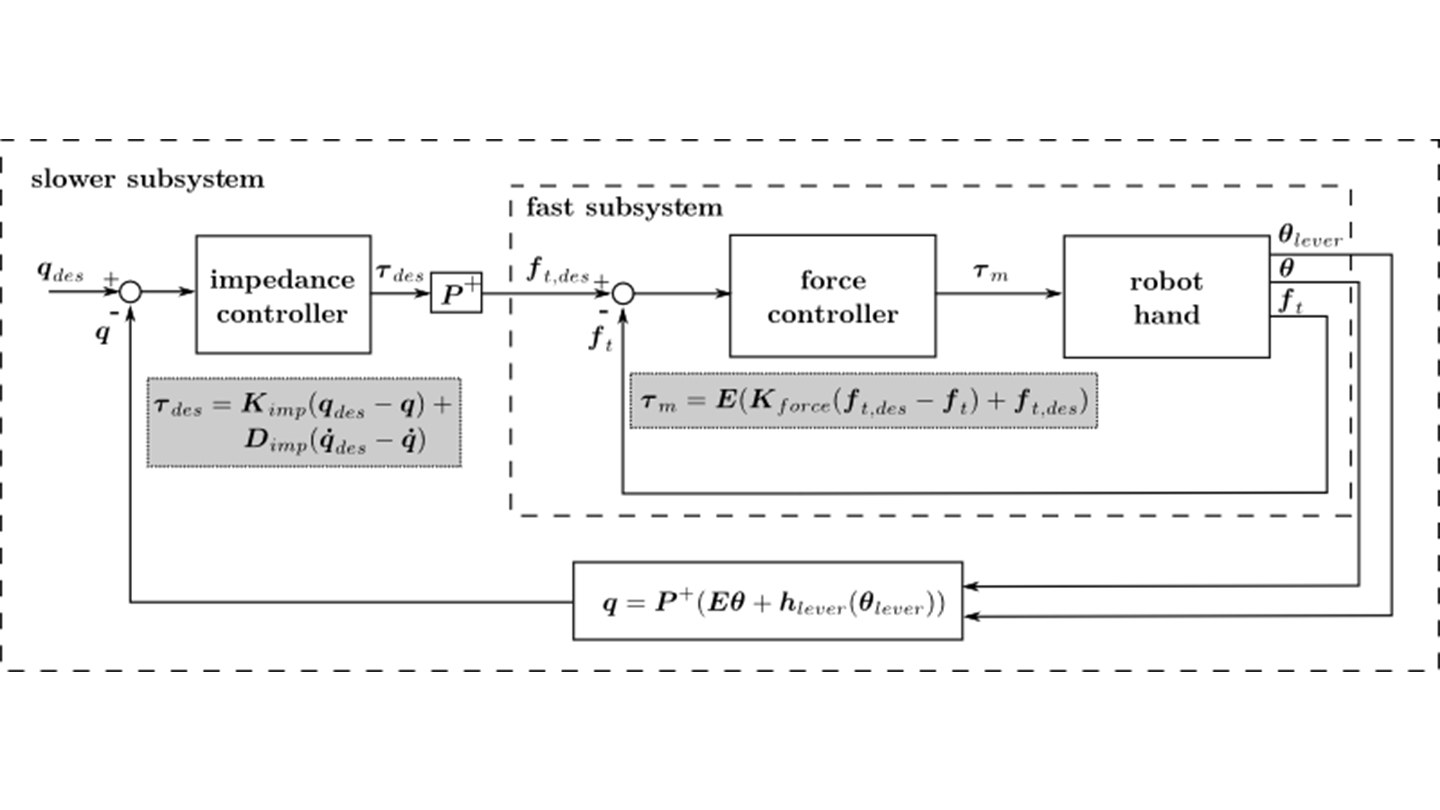
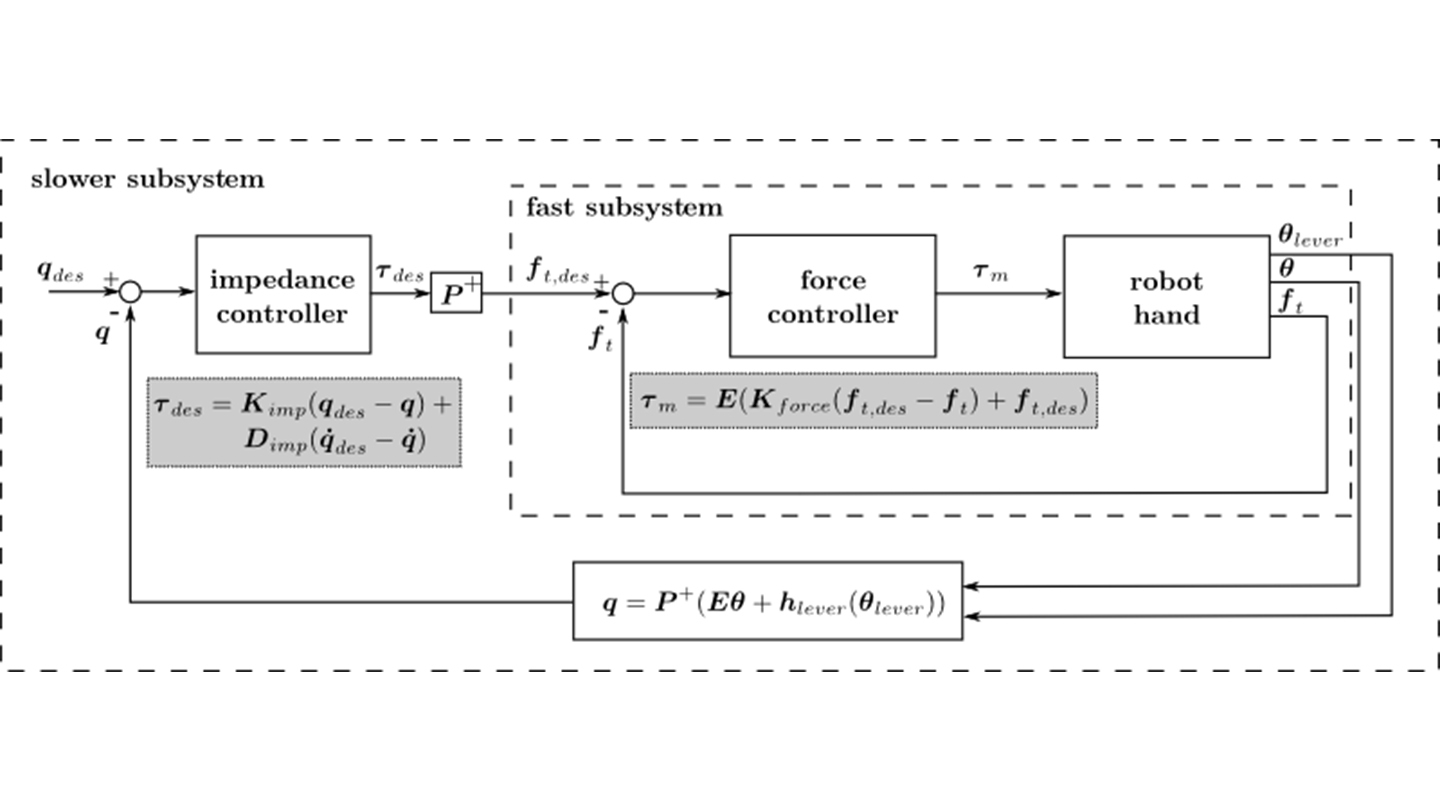
Hand control
anthropomorphic kinematic offers excellent grasping capabilities
flexible tendons provide impressive robustness but require complex control scheme
internal forces can modulate the joint stiffness but must satisfy the torque and pulling constraints
Backstepping-Regelung

{kind=link}
On-Going Work
The ESP control concept is currently extended to the fingers of David, which feature a highly nonlinear and elastically coupled behavior.
Selected Publications
Mengacci, Riccardo, et al. "Elastic Structure Preserving Control for Compliant Robots Driven by Agonistic-Antagonistic Actuators (ESPaa)." in IEEE Robotics and Automation Letters 6.2 (2021): 879-886.
Manuel Keppler, Dominic Lakatos, Christian Ott, Alin Albu-Schäffer, "Elastic Structure Preserving Impedance (ESπ) Control for Compliantly Actuated Robots", in Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, Oct 2018.
Manuel Keppler, Dominic Lakatos, Christian Ott, Alin Albu-Schäffer, "Elastic Structure Preserving (ESP) Control for Compliantly Actuated Robots", in IEEE Transactions on Robotics, Volume: 34 , Issue: 2 , April 2018.