
MASCOT

Credit:
PR
Duration: | 2011-01-01 until 2018-12-31 rocket launch: 3 December 2014 |
Project partners: | • Hayabusa 2 Mission (JAXA, Japan Aerospace Exploration Agency) • MASCOT structure (DLR Braunschweig FA-MFW) • GNC, guidance, navigation & control system (DLR Bremen RY) • PCDU, power and communication systems (CNES, Centre National D’études Spatiales) • OBC, on board computer (Telespazio VEGA Deutschland GmbH) • CAM, visible camera (DLR Berlin PF) • MARA, infrared radiometer (DLR Berlin PF) • MAG, magnetometer (Techincal University Braunschweig) • MicroOmega, near infrared hyperspectral microscope (IAS Paris) • MOB, mobility unit (DLR Oberpfaffenhofen RMC) |
Website: | |
Applications: | • Analysis of asteroid Ryugu’s mineral composition, temperature and magnetic characteristics • Sample collection and return to earth |
Funding: | DLR |
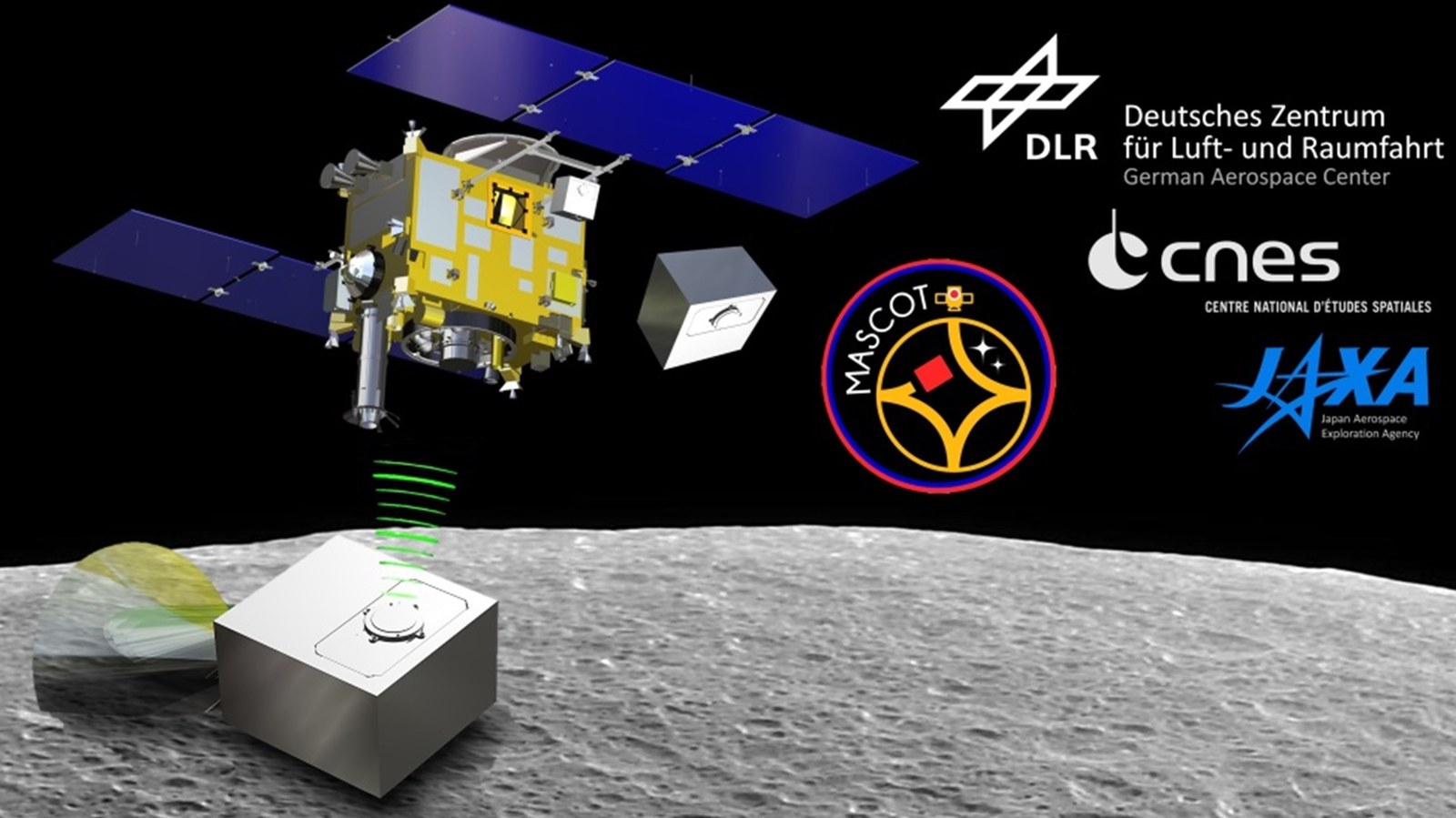
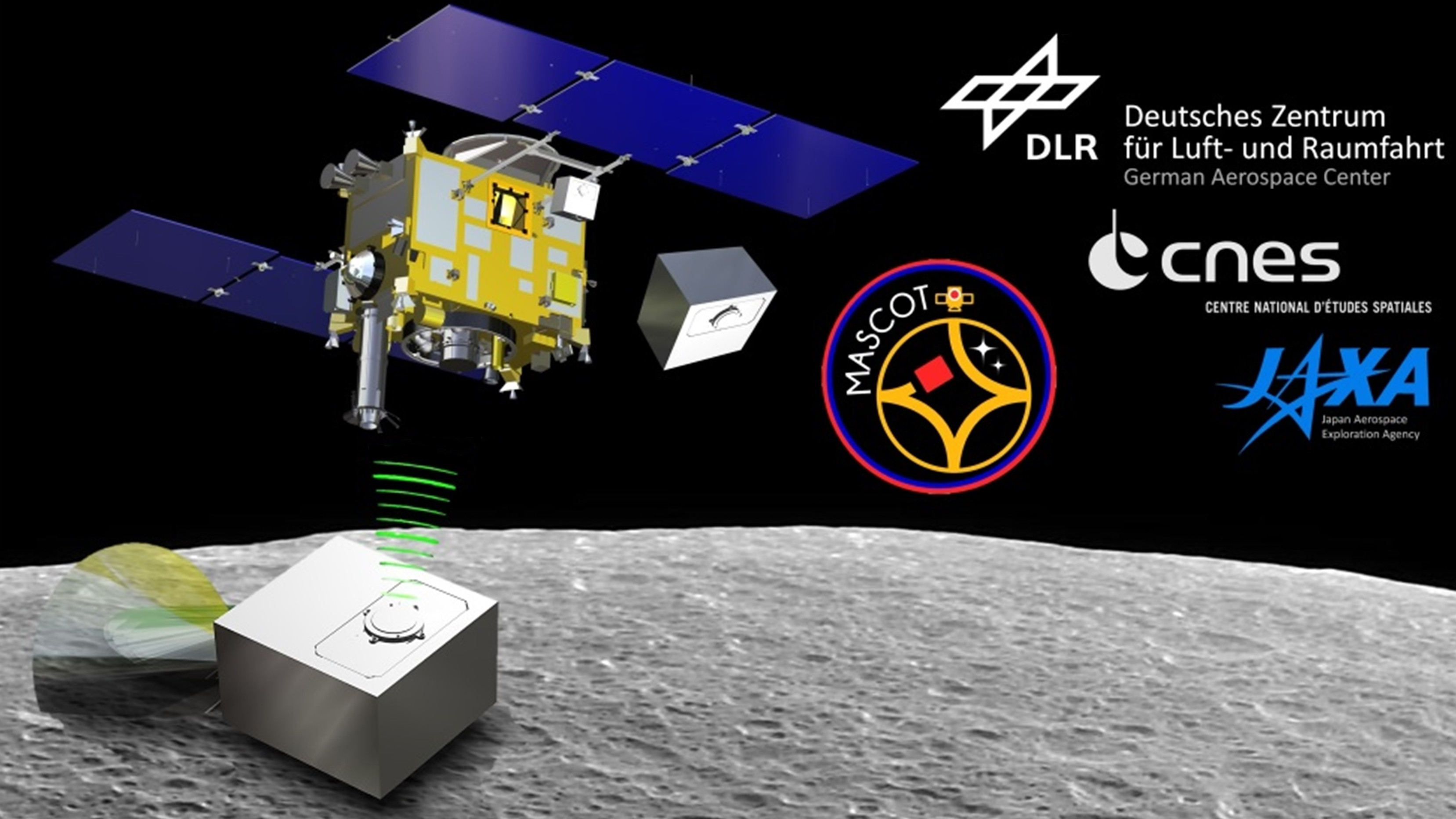
MASCOT scenario
Depiction of Hayabusa2 and MASCOT in mission scenario at asteroid
{kind=link}
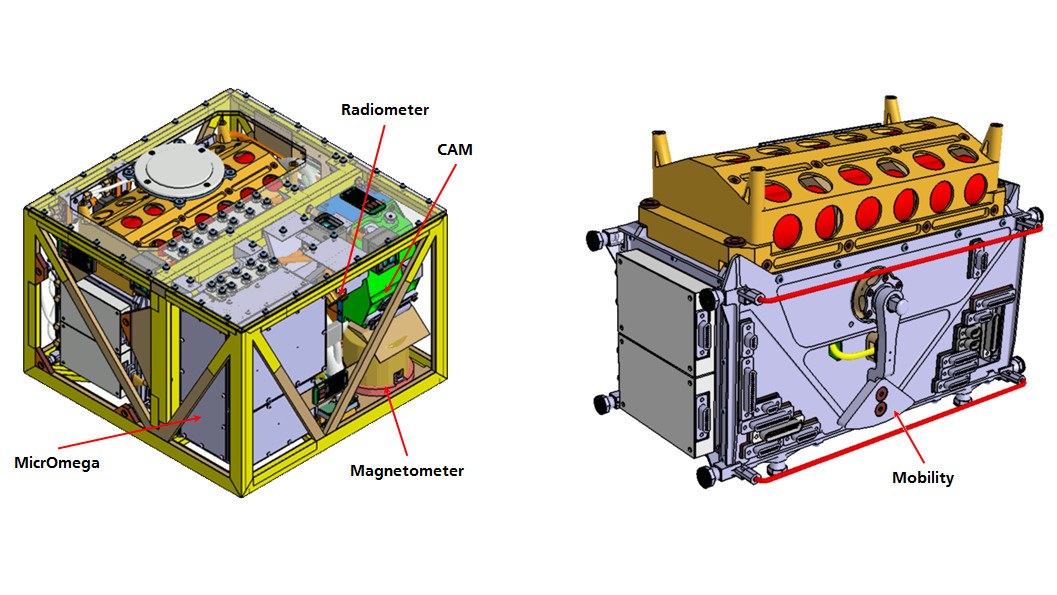
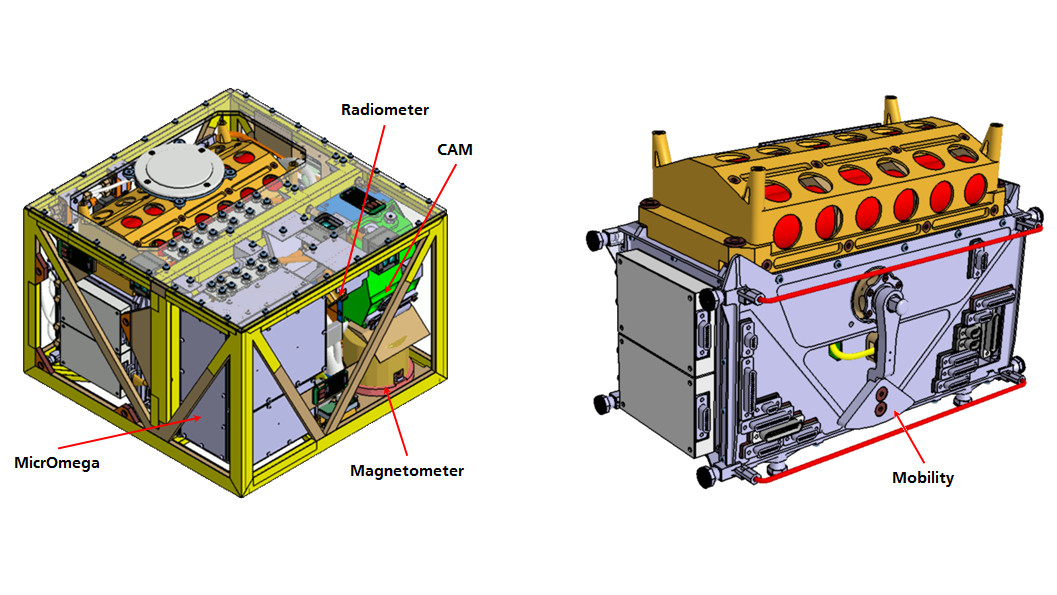
MASCOT system
CAD drawing of the MASCOT system (left) and its electronics box (right) with the mobility motor mounted on.
{kind=link}
MASCOT mission logo
Logo of the MASCOT mission
Image: 6/6, Credit:
PR