
Premiere for German space robotics - robot arm from Oberpfaffenhofen moves in free space
ROKVISS robot arm on the International Space Station ISS has started routine operation after successful tests

{kind=link}
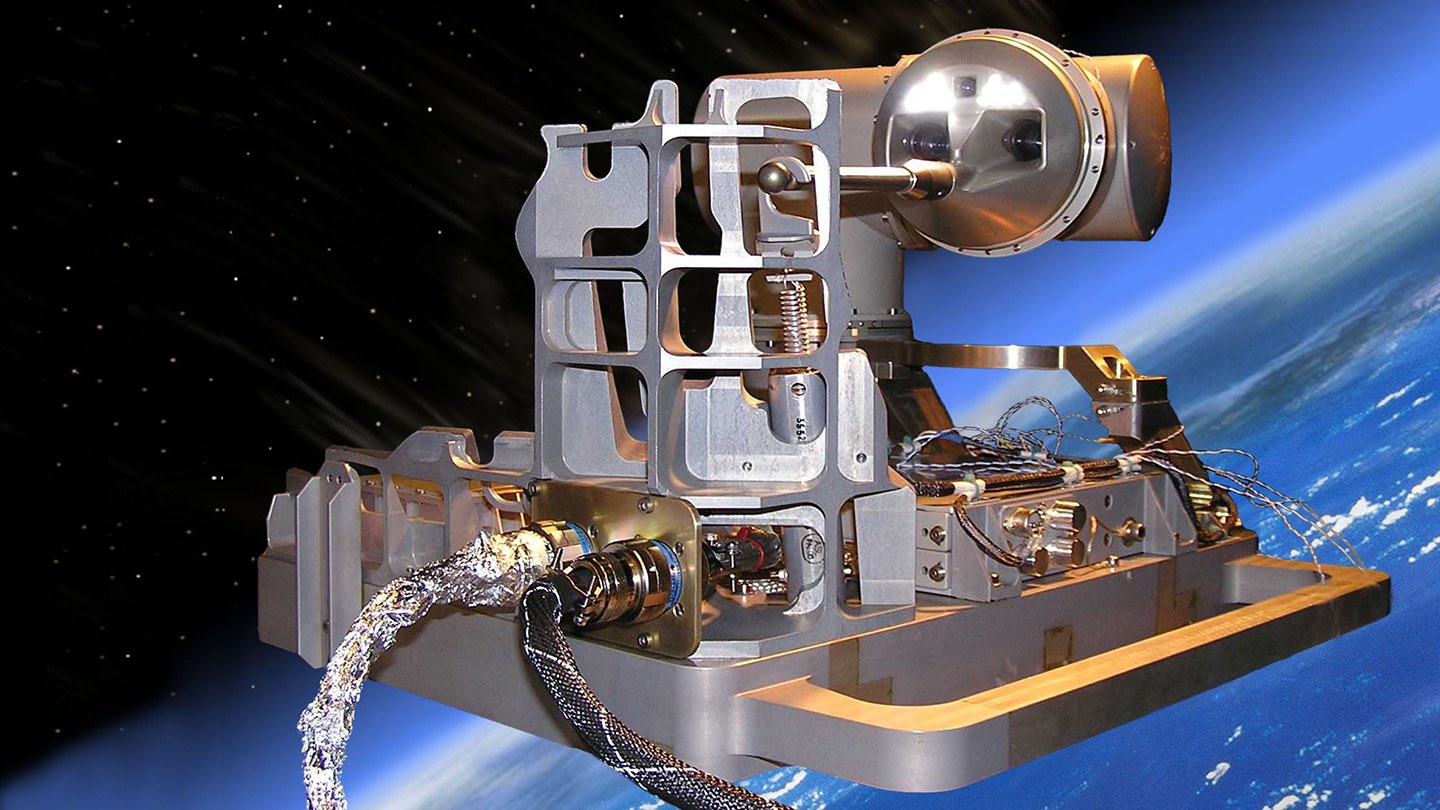
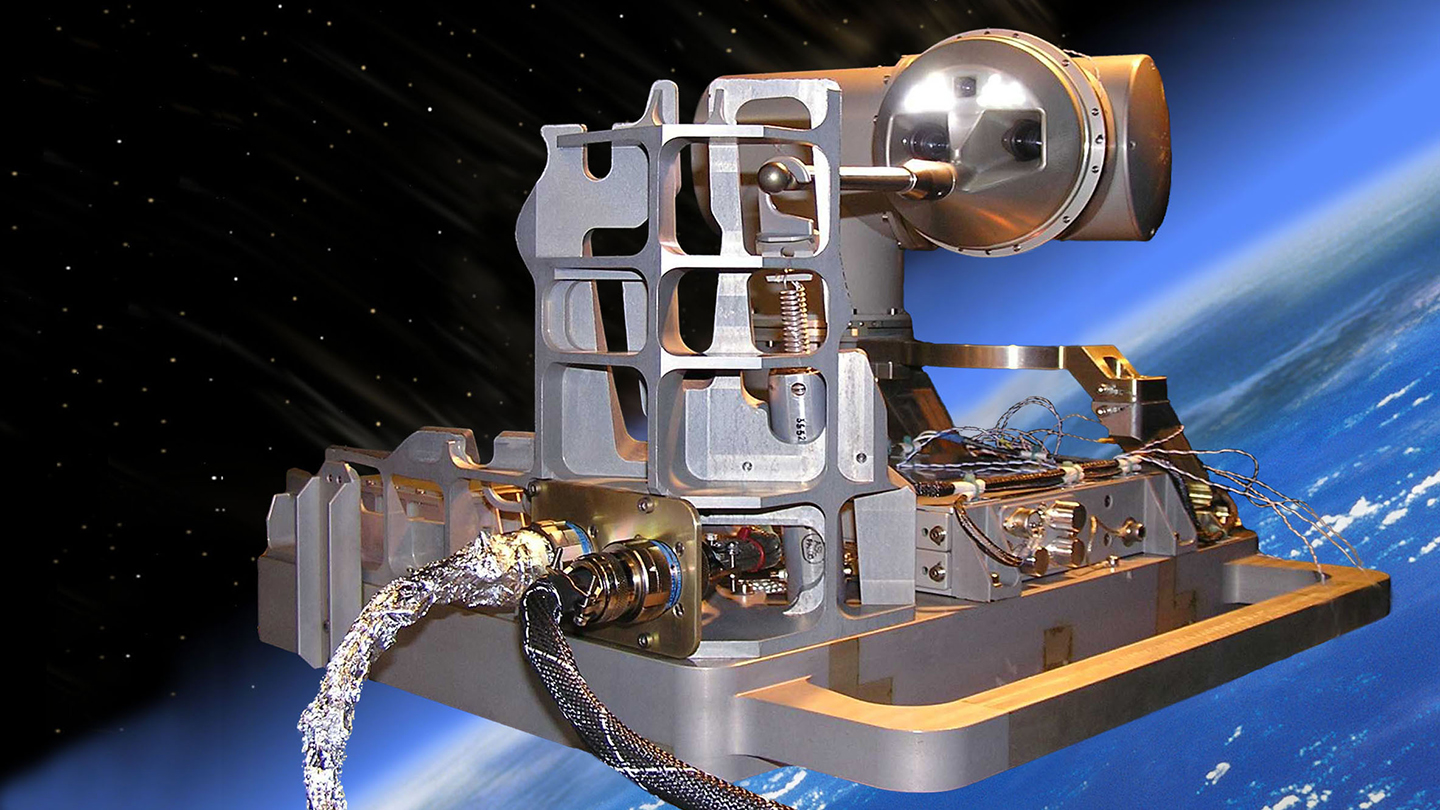
Cologne/Oberpfaffenhofen - A new chapter for German space robotics began on 22 March 2005 at 13.30 CET with the first movement of a German robot in free space. The innovative robotics experiment ROKVISS (Robotics Components Verification on the ISS) developed by the German Aerospace Center (DLR) has now started its work on the International Space Station ISS. A decisive step in the execution of the experiment has been taken: all systems are functioning normally and the actual routine operation of the experiment, planned for one year, under the harsh space conditions has been launched. The approximately 50-centimetre robot arm with two joints, a metal finger and two integrated cameras was controlled from the ground and then set itself in motion in the so-called automatic operating mode. Specifically, sequences of commands were sent to the ISS, which were later executed independently by the robotics unit and automatically as programmed. This test was carried out by the ROKVISS project team during the approximately six-minute flight over the DLR ground station in Weilheim, south-west of Munich.
Direct robot control planned almost without time delay
Another challenging experiment is planned for the beginning of April 2005: Then the robot arm will be directly controlled in space from Weilheim with an extremely short time delay of only about ten milliseconds. This telepresence operating mode represents a novelty in space robotics and is regarded as an essential technical prerequisite for future service and repair tasks in space.
The aim of the experiment planned and developed in Germany is to test and verify new robot hardware and powerful control concepts in realistic mission operation. In the future, this innovative robot technology should support and relieve astronauts in complicated tasks. In addition, it could enable the repair of satellites controlled from the ground.
At the beginning of December 2004, the German robot arm successfully completed all final tests in Moscow. On 23 December 2004, ROKVISS was launched by a Russian Soyuz U rocket at 23.19 CET to the International Space Station ISS.
Important project for German space industry and research
The project is financed by the German Aerospace Center (DLR) with funds from the Federal Ministry of Education and Research (BMBF). As prime contractor, EADS Space Transportation in Bremen was responsible for system integration and for essential components of the on-board software. The DLR Institute of Robotics and Mechatronics in Oberpfaffenhofen developed and built the robotic components and is responsible for conducting the experiments and for the scientific evaluation of the results. The Munich-based company Kayser-Threde is responsible for the development and construction of the experiment computer, the power supply and the technical support of the DLR institute. The company Hoerner & Sulger supplied the camera equipment with electronic accessories. The project is managed by DLR's Space Agency. The execution of the mission is based on an agreement between DLR's Space Agency, the Russian partners ROSKOSMOS and RKK Energija as well as the Munich-based company Kayser-Threde as prime contractor for the S-band communication infrastructure.
The costs for the ROKVISS experiment amount to 11.5 million euros including 3.5 million euros for launch, assembly and operation on the ISS, which Germany is paying to the Russian contract partners.
Image and video material is available from:
Rainer Karnowski, EADS Space Transportation